Introduction
Soft pneumatic actuators (SPAs) have a significant impact on the soft robotics field by enabling a variety of applications of soft robotics, such as grasping,
1,2 locomotion,
3,4 and manipulation.
5,6 These versatile functionalities come from not only the inherent flexibility and adaptability of soft materials but also the capacity of SPAs to produce diverse two-dimensional (2D) and three-dimensional (3D) motion patterns.
7–9 This is achieved by preprogramming the morphology of the actuator to achieve complex motions from a single pressure input, thus reducing the need of complex control.
10–13This trait has been widely employed in designing soft robots, especially those that draw inspiration from biological entities, as the desired actuator shape can be derived from creatures' movement. For instance, the locomotion pattern of inchworms has been replicated by designing actuators to recursively crawl,
4 while the grasping profile of an elephant trunk has been emulated by actuators with helical configurations to achieve versatile and secure holds.
6Despite considerable advancements in discovering suitable soft actuator structures and materials to mimic biological motions, the design process is impeded by complexities tied to the dynamic, contact, and multimodal modeling of these actuators.
8,9 Addressing these challenges remains difficult, given the limitation of current modeling and computational approaches in managing large geometric deformation and material nonlinearity.
14 As a result, the research community's current primary focus lies in designing soft actuators for specific profiles or trajectories with kinematic models and optimization methods
15 by establishing systematic methodologies and strategies to enhance efficiency.
12,15–17Fiber-reinforced SPAs, recognized for their versatile applications,
4,18,19 leverage fiber arrangements for varied 2D and 3D motion.
10 Connolly et al.
16 presented an analytical model for these SPAs, comprising distinct modules for bending, twisting, elongating, and expanding. They took a predefined kinematic trajectory for each module and applied optimization to identify optimal actuator design parameters for matching shapes along the trajectory.
Singh and Krishnan,
17 concentrating on bending modules, proposed a method that segments 2D curves into piecewise constant curvature (PCC) sections, with design parameters derived from their analytical model. However, the complex manufacturing of fiber-reinforced SPAs, especially the fiber routing process, faces challenges such as extended production time, inconsistency issues, and design limitations.
PneuNets actuators, formed of interconnected pleated channels within an elastomer, deform when pressurized.
20 Their behavior is defined by altering channel geometry or material distribution.
11 Advances in 3D printing allow these actuators to be crafted either
via 3D-printed molds and silicon casting
15 or direct 3D printing with flexible materials.
21 Following Connolly et al.'s strategy,
16 Jiang et al.
15 modeled PneuNets, which include bending, twisting, and helical modules. Their design process starts with manual 3D curve segmentation, followed by their analytical model and optimization to determine the actuator design for the target shape.
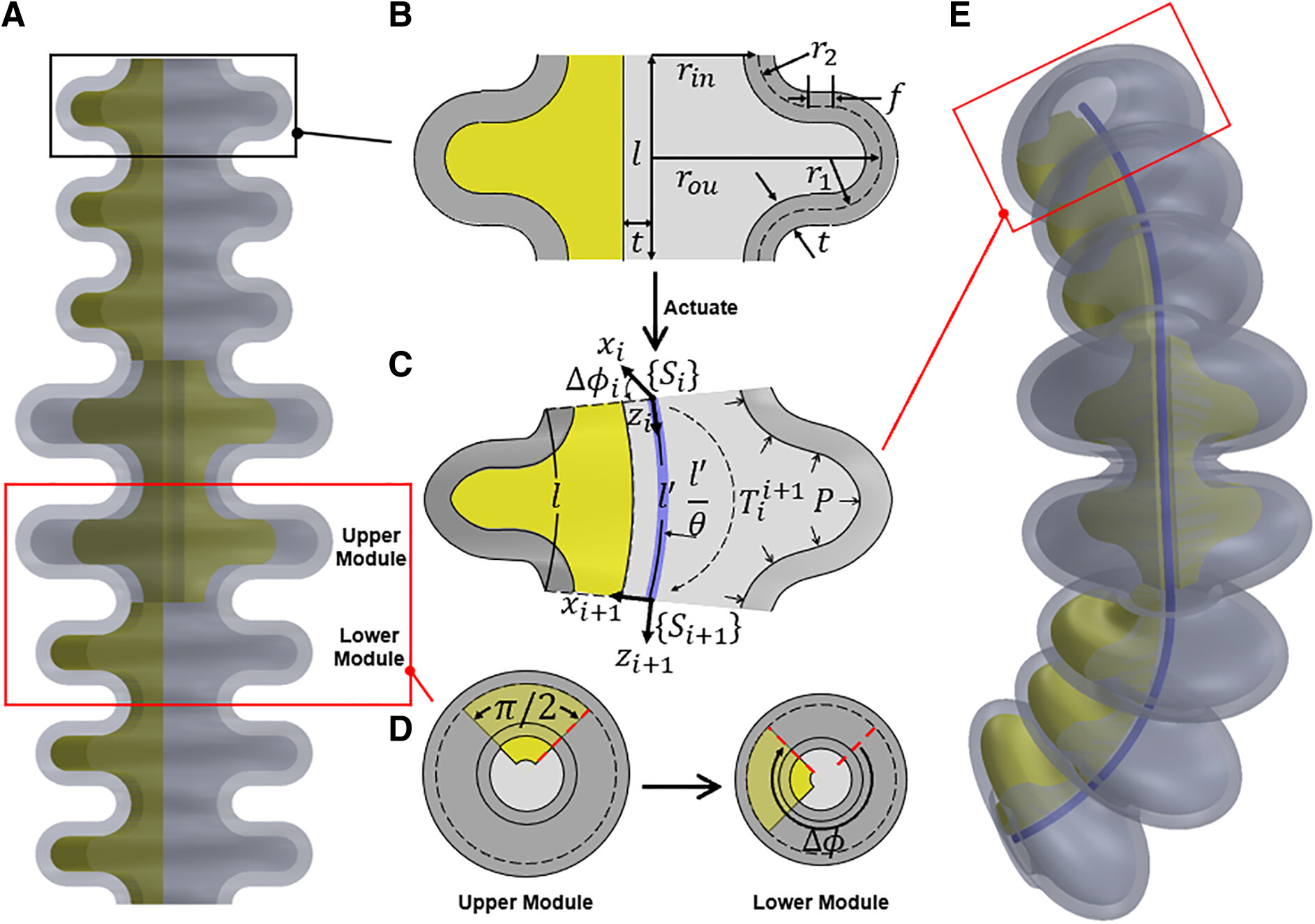
Transitioning to bellow SPAs, replacing PneuNets' sharp channels with bellow-shaped convolutions, leads to an unfolding structure under pressure.
22,23 This feature enables transferring material strain into structural deformation, making bellowSPAs particularly suitable for 3D printing materials such as Agilus30™ due to their lower elongation-at-break compared with silicon elastomers,
24 ensuring precision in production. Kan et al.
12 proposed an analytical model for modularized bellow SPA designs, using interconnected channels to achieve varied deformation curves. They employed a sampling-based optimization to design channels for a desired end-tip trajectory.
Analytical models, although widely used for forward kinematics, often struggle to accurately predict substantial deformations due to their reliance on geometric simplifications coupled with material nonlinearity. The finite element method (FEM) is known for its accurate predictions
25 but is computationally expensive, making it unsuited for repeated optimization tasks.
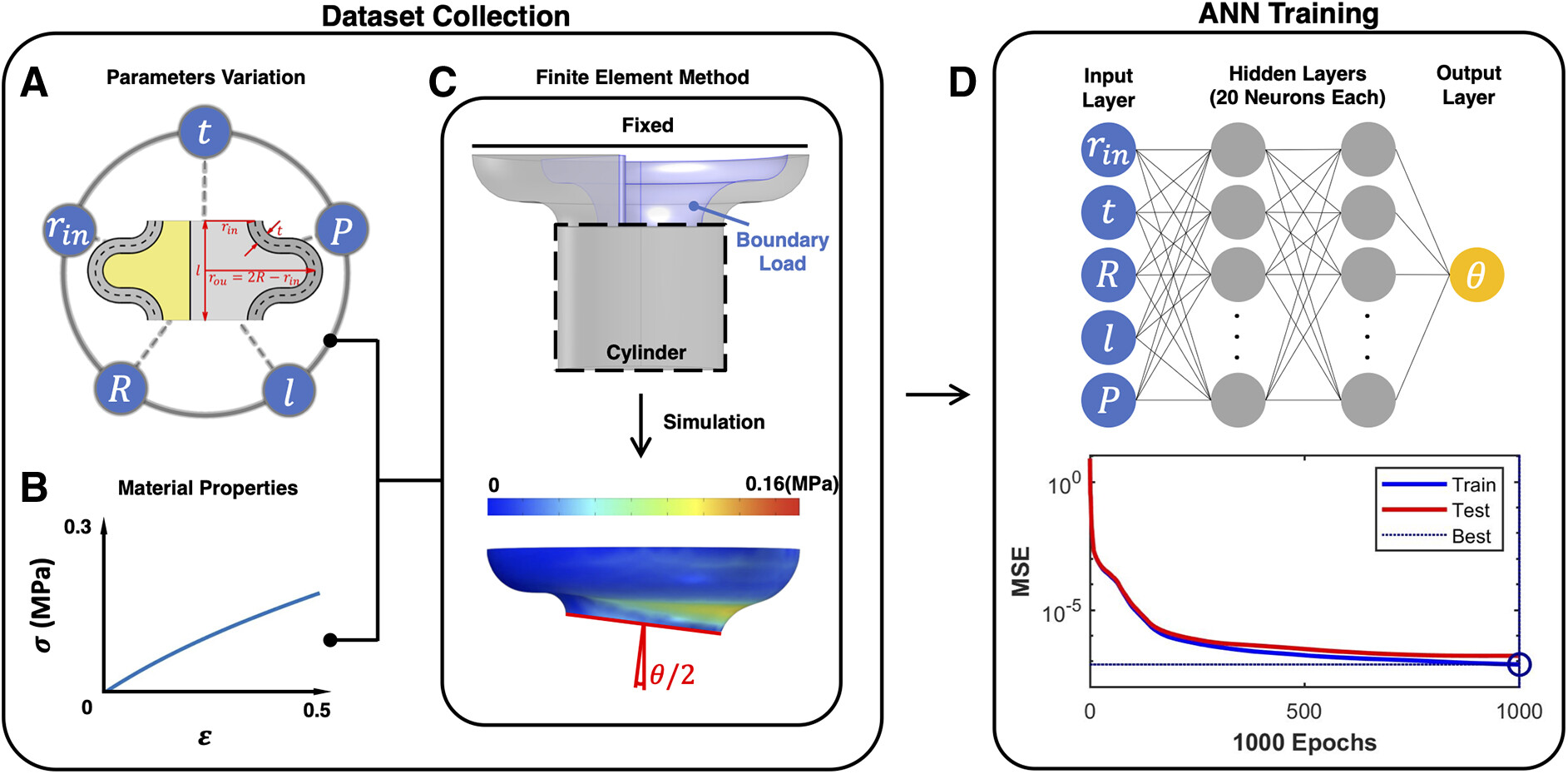
26,27 Recent advances use machine learning, particularly supervised artificial neural networks (ANNs) trained with FEM data, to create efficient surrogate models for bellow SPAs.
28 However, these models have covered limited actuator design spaces.
29Furthermore, current shape-matching optimization methods for SPAs are limited by the need for human intervention in segmenting 3D shapes and in converting optimal parameters into a manufacturable design. This results in a lack of an end-to-end solution for seamlessly connecting the desired shape to a ready-to-print actuator design file. Furthermore, the inherent complexities of implementing design frameworks emphasize the need for an open-source user-friendly design toolbox to enhance accessibility and efficiency.
30 Presently, the available toolboxes for bellow SPAs exhibit some limitations, either focusing solely on simulation or covering a limited design space.
31–33 In contrast, some permit optimization but lack a specific focus on shape matching.
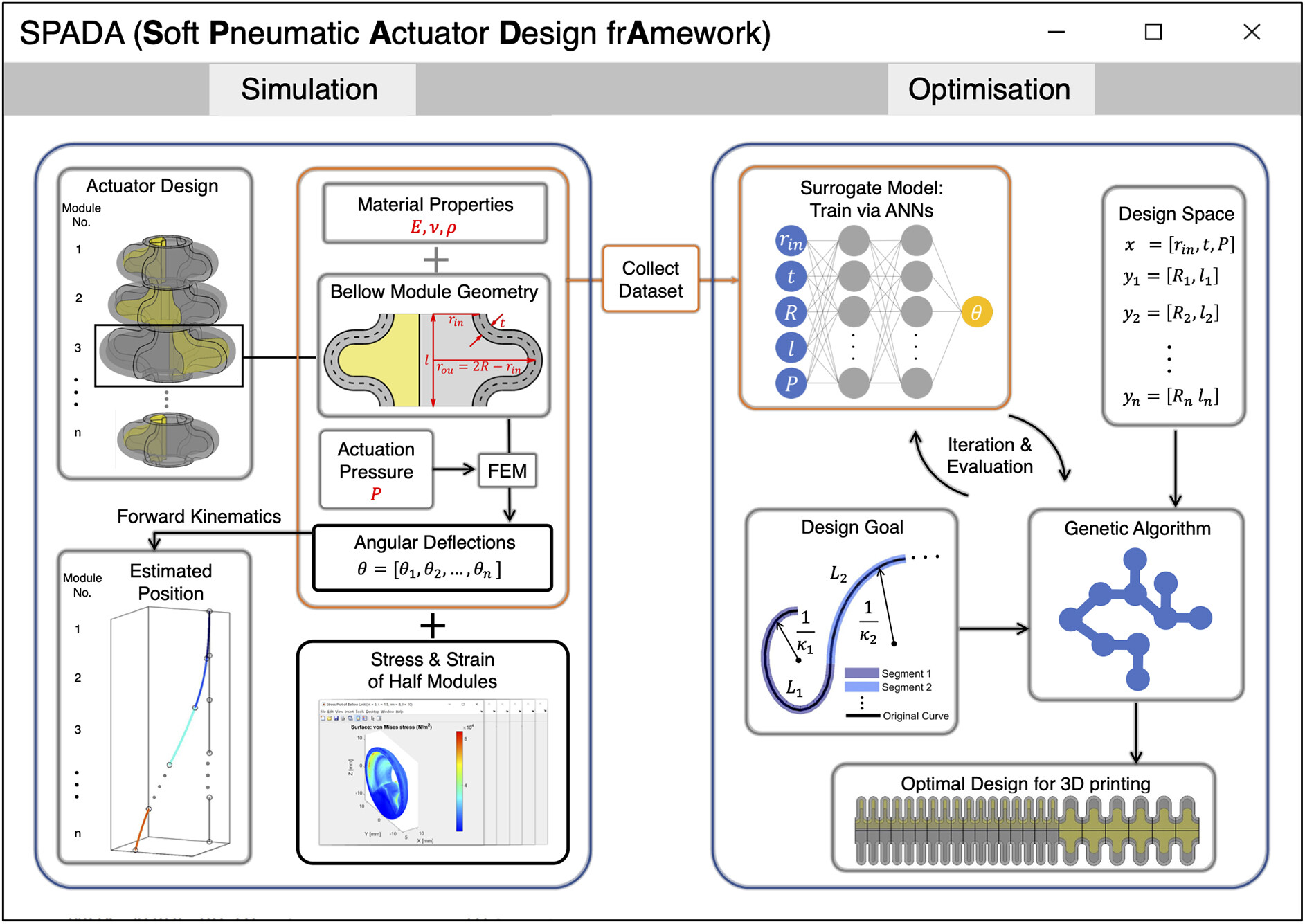
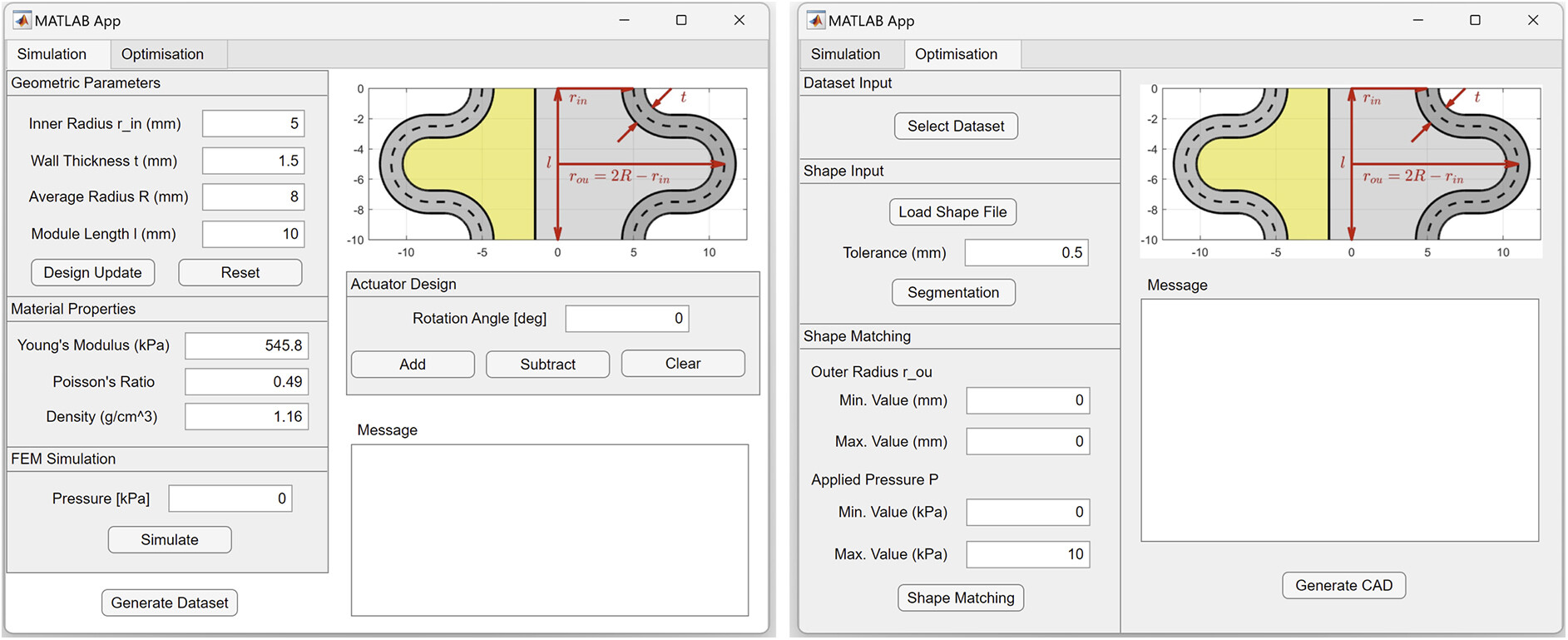
33,34Therefore, to address the above challenges, this article provides an end-to-end shape-matching design framework for bellow SPAs, and an open-source toolbox named SPADA (Soft Pneumatic Actuator Design frAmework), which implements this framework through a user-friendly graphic user interface (GUI).
Figure 1 shows the schematic of the functions included in this design toolbox, consisting of simulation and optimization functionalities. The simulation component permits modular design customization, defining material properties, and predicting actuator kinematics using FEM combined with PCC approximation.
It also allows for collecting an FEM data set based on varied geometric parameters and actuation pressures. The optimization component can generate a surrogate model, trained on FEM or self-characterized data, to expedite computations. It segments input 2D/3D curves using PCC segmentation and uses the surrogate model to optimize the bellow SPA's design parameters for shape matching.
The rest of this article is organized as follows:
Design and Methods section details the shape-matching design method, covering the bellow SPA's kinematics, FEM simulation, surrogate modeling, and the shape-matching optimization for determining design parameters.
The Toolbox Implementation section introduces the SPADA toolbox, implementing the discussed framework with a user-friendly GUI for kinematic analysis and shape-matching optimization.
Results section applies the toolbox for precise 2D shape-matching designs, also exploring 3D actuator design potential.
The Toolbox Implementation
To amplify the efficiency and user accessibility of our design framework, we have developed SPADA—an open-source design toolbox with a user-friendly GUI (
Fig. 5)—built on MATLAB and COMSOL MultiPhysics. Compared with our previously published bellow SPA design toolbox—designed solely for simulating bending actuator behaviors and taking ∼74 minutes per simulation
31—SPADA stands out by facilitating simulations for diverse deformations in just a few minutes and offering efficient end-to-end shape-matching optimization. Here, “end-to-end” refers to the process from the desired shape to the stereolithography files of the designed actuator for 3D printing.
The simulation component allows for the design of bellow SPAs by adjusting the modular geometric parameters, customizing assemblies, and modifying material properties. It utilizes background FEM simulation to analyze the behavior of modules and predict the actuator's configuration through forward kinematics. In addition, it can generate material-specified data sets.
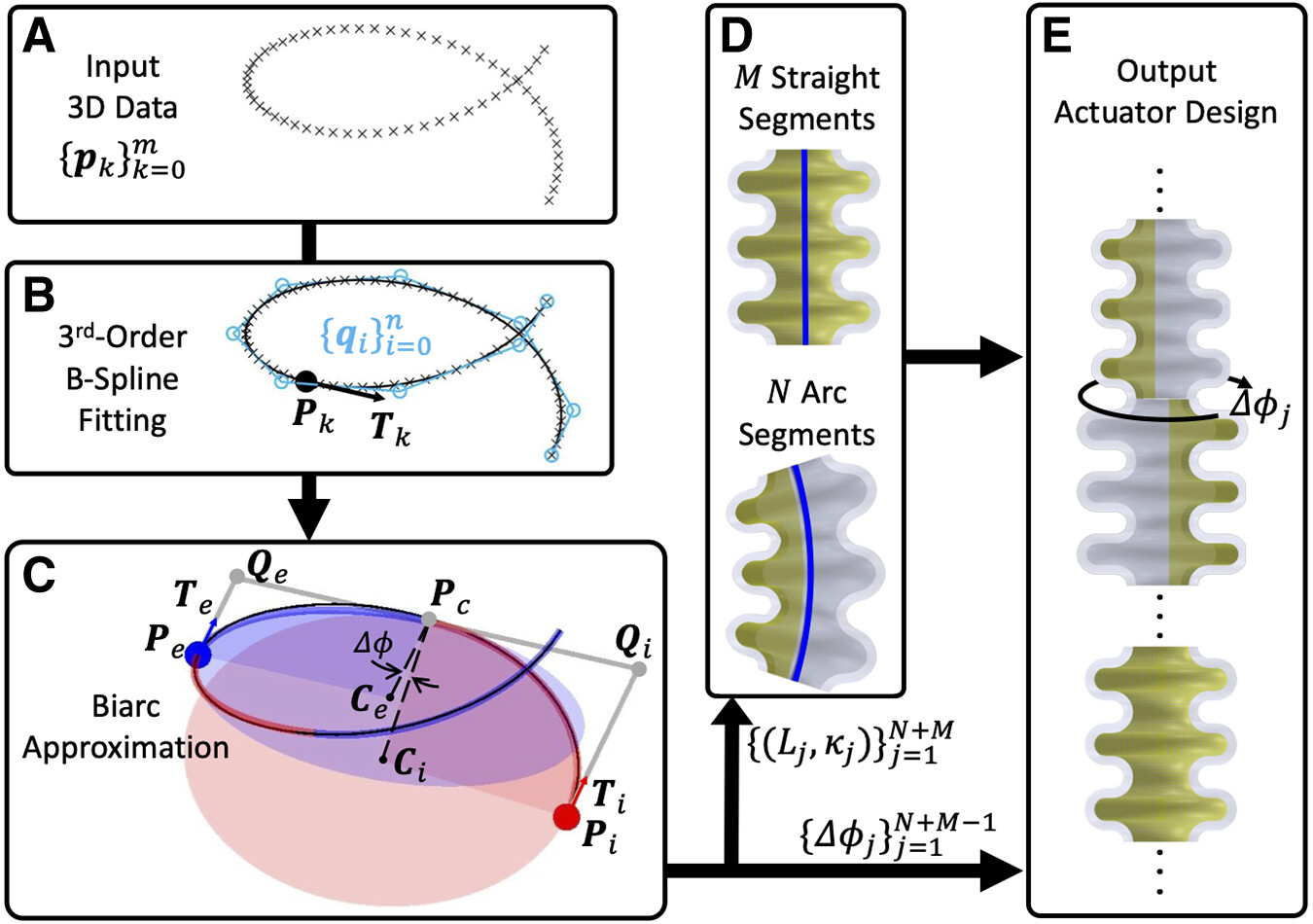
The optimization component can train a selected data set into an ANN to serve as a surrogate model. It takes as input a file containing the desired shape of the actuator, represented as a series of ordered 3D points. The 3D PCC segmentation algorithm segments the desired shape into CC segments, and an optimization algorithm based on a genetic algorithm and the surrogate model is used to find the optimal actuator design parameters that approximate the desired shape. It can also generate computer-aided design files of the designed actuator, ready for direct 3D printing.
See Section C in
Supplementary Data for detailed instructions on how to use SPADA. The source code is available on a GitHub repository,
42 and a demonstration of the toolbox is provided in the
Supplementary Video S1.
Results
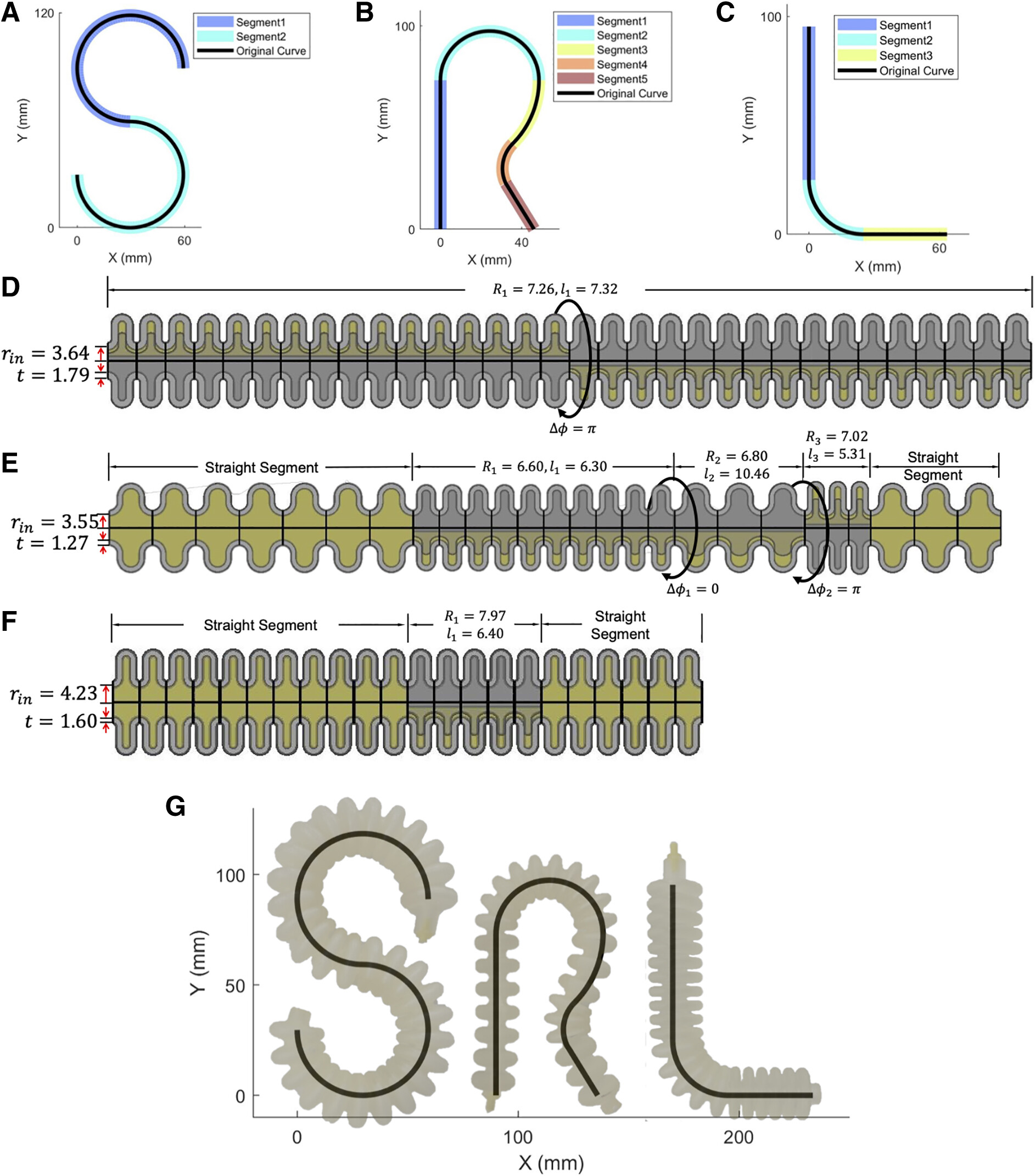
In this section, SPADA was used to design three actuators that accurately match the predefined 2D shapes with root-mean-squared-errors (RMSEs) of 4.16, 2.70, and 2.51 mm, respectively, hence validating the accuracy of the kinematics model, illustrating the efficacy of the shape-matching algorithm, and demonstrating its ability in achieving end to end from desired shapes to designed actuators for direct 3D printing. Furthermore, we harnessed the toolbox's potential in the design of 3D deformable actuators, specifically by designing an actuator according to an elephant trunk-inspired helical shape.
2D shape matching: letter writing
In the 2D case of validating the shape-matching algorithm along with the kinematics model, and also demonstrating the ability of end to end from the desired shapes to 3D-printed actuators, SPADA was used to design three actuators that match the shape of the letters “S,” “R,” and “L,” which is the acronym of Soft Robotics Lab (
Figure 6).
The shape for each letter is represented by a series of ordered 3D coordinates, imported into SPADA as a
“.mat” file. The segmentation results for each letter are highlighted in
Figure 6A–C. The letter “S” is segmented into two arc segments with the same length and curvature. The letter “R” is segmented into two straight segments and three different arc segments. The letter “L” is segmented into two straight segments and one arc segment. All the lower bound values of the outer radius were set to be 9 mm for three actuators optimization for ease of manufacturing.
After optimization, the optimal design parameters are labeled on the schematics of actuators designed by those parameters in
Figure 6D and E. The surrogate model used was provided with the toolbox, which was trained by a provided FEM data set of the default material Agilus30 (see information of the FEM and material parameters in Section A in
Supplementary Data). The prototypes were 3D printed on a Stratasys J735™ using the CAD files generated by SPADA.
The shape of the actuated prototypes was compared with the initial desired shape shown in
Figure 6G by overlapping them in the
x–
y plane. The respective RMSEs between the desired shapes and actuators' real shapes are 4.16, 2.70, and 2.51 mm, validating and demonstrating our shape-matching algorithm (refer to Section D.I in
Supplementary Data for details of the experiments, and see the prototypes taking the defined shapes in the
Supplementary Video S1 available on the project's GitHub page
42).
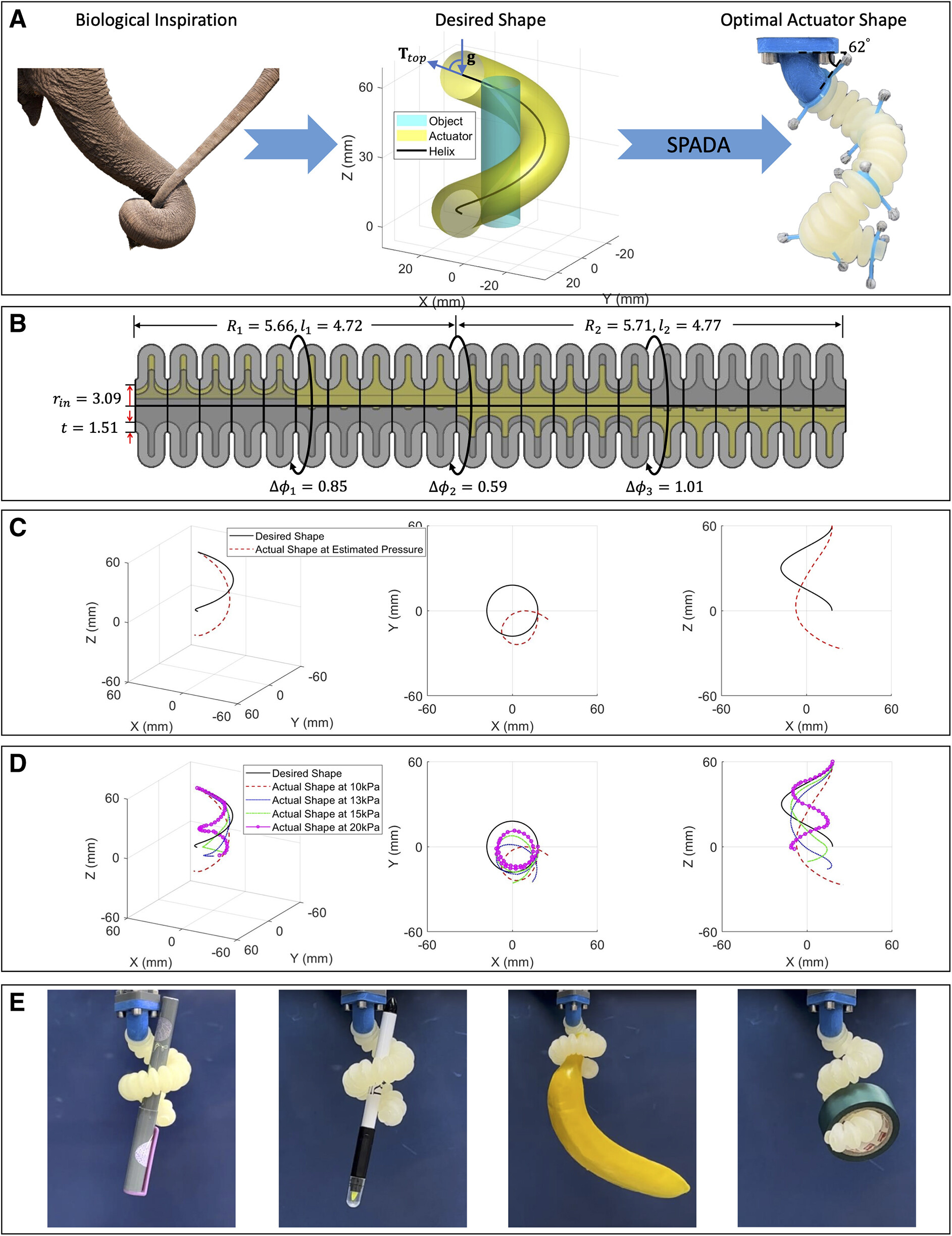
3D shape matching: elephant trunk-inspired shape
The previous 2D case of shape matching validates the efficacy of our end-to-end design framework, given its independence from gravitational effects (
Figure 7). Yet, in the 3D scenario, gravity is unavoidable. Furthermore, gravity acts unidirectionally while the deformation of actuators significantly varies in space, making it exceedingly challenging to incorporate gravity's impact into the modeling process, particularly in modular approaches. This complexity explains why nearly all shape-matching design frameworks sidestep considering gravitational effects.
12,16,17 Although Jiang et al.
15 did incorporate gravity into their analytical model, they were only able to roughly approximate its influence for two types of segments and did not evaluate it in the real world.
We recognize that shape matching, on its own, cannot offer a comprehensive solution for tasks involving gravity and contact. Yet, our design framework and toolbox still provide valuable insights for actuator design, even without considering these factors, thanks to the adaptability of soft actuators. The design of actuators to assume a helical shape, emulating the versatile and secure grasping behavior of an elephant's trunk, is a prime example among the research community.
6,21,43Hence, both to demonstrate the potential of the toolbox for employing 3D shape matching in guiding actuator design and to quantitatively assess gravity's impact on the 3D shape-matching scenario, we delve into an end-to-end example of designing a helical actuator, inspired by the structure of an elephant's trunk, for the purpose of grasping irregular objects, as shown in
Figure 7.
A right-handed helix, with coordinates represented by the mathematical expression , where t is evenly spaced between 0 and , is utilized to embody the helical configuration inspired by the grasping movement of an elephant's trunk. By presuming that the object targeted for grasping fits within a cylindrical dimension of diameter and height, and further constraining the actuator's outer radius to be ∼10 mm, the helix parameters and can be derived for a power grasp.
The helical shape, consisting of a sequential of ordered 3D points, is imported into SPADA. An actuator is then designed to match this shape using the toolbox framework while disregarding gravitational effects.
Figure 7B showcases the design parameters of the actuator, and the toolbox estimates the actuation pressure to be
(which is approximated to
in experiments due to the hardware limitations). To assess the discrepancy between the desired shape and the actual shape of the pressurized actuator under the effect of gravity, we executed a series of experiments. The top end of the actuator is fixed to a connector with an angle of
(
Fig. 7A). This angle corresponds to the divergence between the tangent vector at the helix's top end and the gravity axis.
We first pressurized the actuator to
, a value estimated by the toolbox as optimal for achieving the helical shape.
Figure 7C illustrates the deviation between the desired helical shape and the actual configuration of the actuator at this pressure. The RMSE is calculated to be
.
Subsequently, we escalated the actuation pressure to13, 15, and
.
Figure 7D compares the desired shape and the actuator's actual shapes under these increased pressure values. The calculated RMSEs for these pressures were19.08, 18.69, and
, respectively. Moreover, as observed from the
XY and
XZ perspectives in
Figure 7C and D, it is evident that as pressure increases, the central point of the actual shape (
XY view) approaches that of the targeted shape.
Concurrently, the number of convolutions in the actual shape (XZ view) increases, whereas the height of the actual shape along the z-axis decreases. This phenomenon can be attributed to the escalating pressure that not only counteracts gravitational effects but also enhances the curvature perpendicular to the direction of gravity. This, in turn, induces an increase in the number of helical turns.
However, despite the error caused by gravity, it is still possible to exploit behaviors arising from the design and interaction with the object to achieve a successful grasp. The grasping experiments were performed to explore the potential of the designed actuator for handling various objects, as shown in
Figure 7E. Refer to Section D.II in
Supplementary Data for details of the grasping experiments and watch the prototype grasping objects in the
Supplementary Video S1.
Conclusion
In this study, an end-to-end design framework for the shape matching of bellow SPAs is proposed and implemented as an open-source design toolbox, SPADA. A model leverages FEM-simulated module deformation and PCC approximation to predict the kinematics of actuators. Surrogate modeling involving ANN training on a FEM data set is applied to speed up computation. A 3D PCC segmentation algorithm approximates the desired curve by dividing it into CC segments.
An optimization algorithm, grounded on a genetic algorithm and a surrogate model, determines the optimal design parameters of the actuator to align with the shape of these segments. The toolbox, based on the proposed design framework, has proven its end-to-end capability in designing actuators to accurately match 2D shapes, while also demonstrating its potential to design deformable actuators in 3D space.
Overall, this design framework can be generalized to other soft actuators, such as tendon-driven soft actuators. Users can also specify more material properties for the actuator and use the toolbox FEM simulation function to create a data set for training. A GitHub repository has been created with the toolbox and locations for users to upload self-acquired data sets for codesign. In the future, the authors will maintain and update the toolbox with consideration of the gravity effect and environmental parameters (such as underwater conditions). Add-ons for protocols to design soft actuators for specific tasks will also be investigated, such as soft grippers, soft actuators for surgical operations, and soft crawlers for locomotion.