

Soft Robotics in Upper Limb Neurorehabilitation and Assistance: Current Clinical Evidence and Recommendations
Abstract
Introduction
Technical and Clinical Motivation: Why Do We Need Soft Rehabilitation Robots?
Existing Clinical Evidence: What Can We Learn From It?
| Upper limb segment | Soft UL rehabilitation technologies evaluated in end users | Technical characteristics—main features | Clinical evaluations | Main findings on usability | |||||
|---|---|---|---|---|---|---|---|---|---|
| Soft actuation principle | Weight | Portable/wearablez | Availability | Hospital | Home | Type of therapy/assistance | |||
| Hand | Tenoexo,17 PEXO31 | Spring blades w/ Bowden cables | 105–148 g17 + 492 g backpack (without battery)17,31 | Wearable | Research project | - TBI (Pediatrics) (n = 1)51 | - Active: task-oriented exercises17,31,52,53 -Active: support in ADL51 | - Functional benefit is dependent on the residual abilities of the end user — more severely impaired patients benefit more from the assistance -Clinically meaningful improvement in ARAT (up to +15 points)17,52-Good SUS score (mean = 60.6)52 | |
| HERO45 | Combined linear actuated blades and tendon driven | 284 g, fully wireless54 | Wearable | Research project; Open source; Low cost (>US $160) | - Active: task-oriented exercises45,47,54-Active: support in ADL46 | - Three published user-centered iterative design cycles45,47,54-Improvements in GAS, BBT, MAL-AOU, MAL-QOM, and FM-UE over a training period - Good SUS score (72–99) | |||
| Ironhand, Carbonhand | Tendon driven | 85 g (+600 g control unit) | Wearable | Commercial device (Bioservo) | — | - Active: support in ADL42,48–50 | - First published trial of its type (pilot randomized control at home for extended time)-Feasible to use for assistance and therapy at home for an extended period - Good SUS score (mean = 73)42-Improvements in hand function was generally maintained 4 weeks later49-High grade reported for donning signifying independent usage at home is feasible48 | ||
| EsoGLOVE55 | Pneumatic, fabric-reinforced soft actuators | 180 g (+1260 g actuator) | Portable | Research project turned company (Roceso Technologies) | - Stroke (n = 2, n = 9)55,74 | — | - Active: ROM and strength55,74-Passive74 | - Grasping performance improved with assistance (based on time and task completion metrics)-Good patient feedback on USE questionnaire & custom questionnaire (≥5/7 on Likert scale) | |
| Exo-Glove,41 Exo-Glove Poly II32 | Tendon driven | 194 g,41 104 g (+ 1140 g actuator)32 | Portable | Research project | - Healthy (n = 1)41-SCI (n = 1 d, n = 2)32,41 | — | - Active: task-oriented training32,41 | - Grasping performance improved while wearing the glove (based on grasping and lifting force)-Highly adaptive structure and mechanism | |
| Cappello et al., 201830,33,35–37 | Pneumatic, fiber-reinforced actuators | 77 g (+5 kg actuator) | Wearable | Research project | - SCI (n = 9e),30 (n = 3f),35 (n = 13e)37 | - Stroke (n = 10)36 | - Active: task-oriented training30,33,35–37-Active: support in ADL37-Passive36 | - Largest improvements in TRI-HFT were found in participants with the lowest baseline scores30-Participants shared that they would be willing to use the device all day due to its low weight and minimal obtrusiveness - SUS score shows likeliness to accept a soft wearable glove for daily usage30 (77.2 +/- 14.7)36-9/10 participants could don/doff and use the device independently36 | |
| PneuGlove38–40 | Pneumatic | Not specified | Wearable | Research project | — | - Active: task-oriented training38–40 | - n/a | ||
| Kim et al., 202243,44 | Cable driven | Not specified | Portable | Research project | — | - Active: strength and ROM44-Active: task-oriented exercise43 | - With device assistance, increase of average workspace of the thumb increased by 43% (distal-proximal), 207% (dorsal-palmar), and 248% (radial ulnar) directions -Assistance allows for more stable grasping and manipulation in various grasp patterns -Combining robotic hand with mirror hand therapy resulted in greater mean cortical activation on the motor cortex contralateral to the affected hand | ||
| Shoulder/Elbow | O’Neill et al., 202058,61 | Pneumatic | 150 g (+3600 g actuator) | Wearable | Research project | — | - Active: task-oriented training58-Active: strength and ROM61 | - Good SUS score (79.2+/- 9)-Participants were confident using the robotic wearable - The system’s softness allows it to be highly transparent and allows for natural movement when deflated | |
| Myoshirt56 | Tendon driven | 520 g | Portable | Research project | — | - Active: task-oriented training56 | - Functional ROM is unaffected when wearing the MyoShirt - 8/10 participants found the device intuitive | ||
| Xiloyannis et al., 201975 | Tendon driven | 215 g59 | Portable | Research project | — | - Active: task-oriented training59,75,76 | - Good alignment and fit; tolerable to wear for the whole 90 min session without needing adjustment and showing acceptable skin tolerability59-Positive initial acceptance; good subjective ratings relating to impairment reduction, functional assistance, and user experience59 | ||
| CRUX62 | Tendon driven | 1300 g | Wearable | Research project | - Healthy (n = 4) - Stroke (n = 1) | — | - Active: task-oriented training62 | - No significant changes to the user’s natural ROM while wearing | |
| Lotti et al., 202377,78 | Tendon driven | 2 kg | Wearable | Research project | - Multiple Sclerosis (n = 8) | — | -Active: task-oriented training77,78 | - The exosuit allowed for an improvement in ROM without hindering the wearer’s motion | |
| Koh et al., 201779 | Pneumatic, fiber-fabric-reinforced actuator | Not specified | Portable | Research project | - Healthy (n = 6) | — | - Active: strength and ROM79-Passive79 | - n/a | |
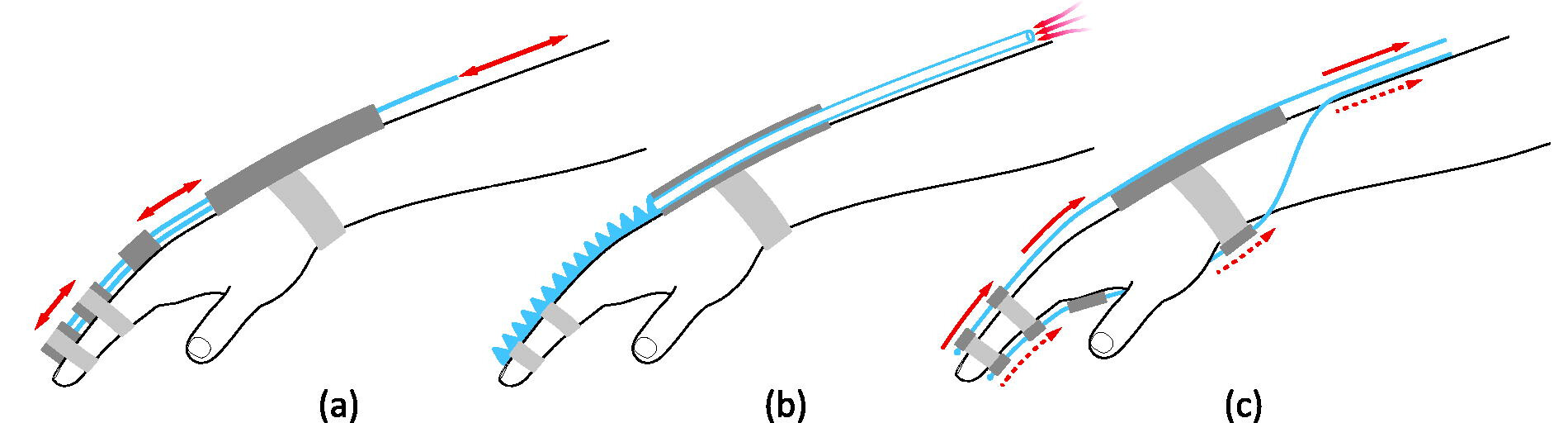
Distal upper limb soft robotics—the hand and wrist
Proximal upper limb soft robotics—the shoulder and elbow
Discussion
Use cases and applications of the technology
Technical applications and outlook
Clinical validation
Recommendations
Acknowledgment
Author Disclosure Statement
Funding Information
References
Cite
Cite
Cite
Download to reference manager
If you have citation software installed, you can download citation data to the citation manager of your choice
Information, rights and permissions
Information
Published In
Keywords
Rights and permissions
Authors
Authors’ Contributions
Metrics and citations
Metrics
Publication usage*
Total views and downloads: 727
*Publication usage tracking started in December 2016
Publications citing this one
Receive email alerts when this publication is cited
Web of Science: 0
Crossref: 6
- Biomimetic Strategies in Orthosis Design: A Scoping Review of Biological Abstraction and Functional Translation
- Embodied Intelligence in Wearable Robotics
- The Role of Vibrotactile Stimulation in Soft Rehabilitation Glove-Assisted Hand Rehabilitation Training: A Pilot Study
- Human–machine collaborative rehabilitation toward Industry 5.0: principles, technologies and challenges
- Feasibility of post-stroke hand rehabilitation supported by a soft robotic hand orthosis in-clinic and at-home
- HandMATE: Advancing Accessible Hand Rehabilitation for Persons With Stroke
Figures and tables
Figures & Media
Tables
View Options
View options
PDF/EPUB
View PDF/EPUBAccess options
If you have access to journal content via a personal subscription, university, library, employer or society, select from the options below:
I am signed in as:
View my profileSign out

I can access personal subscriptions, purchases, paired institutional access and free tools such as favourite journals, email alerts and saved searches.
loading institutional access options
Alternatively, view purchase options below:
Purchase 24 hour online access to view and download content.
Access journal content via a DeepDyve subscription or find out more about this option.
