Introduction
Effective handling of crane systems has received widespread attention in recent years due to their vast implications within container and logistic industries, centering the loading and unloading process between cargo freighters and destined harbors. Importance ultimately falls on considerably reduced freight costs, loading complexity, energy usage, complicatedness of operational mechanism, and transferrable capacity brought about by advancement of such technology.
1 Controlling a crane presents a much more intricate set of challenges compared to controlling a bridge. Unlike bridges, cranes are under-actuated systems, complex dynamics, and non-holonomic presence. This makes it exceedingly difficult to achieve precise control, even with the aid of control devices like dampers that are attached between the crane and its columns.
2,3 Particular challenge has been recognized on the transferring of payloads which exhibit oscillating and hurdling behaviors. Such has simultaneously given rise to an appealing handling issue among practitioners and control community for the development of a precise controlling mechanism which secures swifter payload transference with minimized bounce and oscillation.
Hopping on the academic bandwagon, a generous number of literature investigating the control precision of crane systems were published, which enclosed numerous control algorithms such as finite time sliding mode controller for fuzzy control,
4 H-infinity output feedback based on fuzzy model,
5 precision-positioning adaptive controller,
6 nonlinear sliding mode controls,
7 backstepping controller,
8 time-varying sliding mode control,
9 dual sliding mode control,
10 and LMI fuzzy control.
11 Upon recognizing the sole proficiency of aforementioned control schemes towards the handling of a single-input-multi-output (SIMO) crane systems by regulation of a single input (i.e., force, voltage), they have fundamentally neglected the influence of extreme coupling across disparate input channels within a real-time crane system which substantially hinders the performance robustness of implemented controller. With this in mind, proposition was set by several researchers on multi-input-multi-output (MIMO) control strategies with consideration for peripheral input channels due to their increased real-time practicality. Numerous academic endeavors were then proceeded to examine the effective handling of MIMO crane system, through investigated approaches such as enhanced-coupling nonlinear controller,
12 nonlinear adaptive tracking controller,
13 adaptive fractional-order fast terminal sliding mode with fault-tolerant control,
14 LQR controller,
15 robust tracking control using adaptive fuzzy control,
16 adaptive fuzzy control,
17 nonlinear controller embedded with an integral term,
18 and payload motion control.
19 With model-based approaches being concurrently emphasized within the literature towards designing respective controllers for both SIMO and MIMO crane systems, overwhelming efforts were especially invested to acquire the highly arduous mathematical model for each system.
20 Such attempts, nonetheless, come with the shortfalls of over reliance on a definite mathematical model towards the development of a robust controller, as well as the inability to evade issue of un-modeled dynamics amidst model simplification for controller design. Erroneous modeling ensues, whilst contributing dissatisfactory handling performance of a crane system.
On the other hand, data-driven or model-free control schemes which bypass the requirement of mathematical modeling were essentially proposed in the controlling of crane systems. Viewing the system as an unexplored black box, such approaches engage controller design by sole utilization of the input and output data.
20,21 Its simplicity has further gained considerable academic endorsement on crane system–related studies in recent years by implementing the metaheuristic optimization algorithms. This is primarily exemplified through the paper by Jaafar and Mohamed
22 in the year 2017 which proposed the implementation of PID tuning method by employment of particles swarm optimization (PSO) for the control of a nonlinear double-pendulum crane system. Having three independent PID controllers being installed towards overseeing each control variable of trolley position, hook sway, and payload oscillation, nine separate parameters were, therefore, required from the PSO algorithm within this research. An alternative approach known as adaptive differential evolutionary (ADE) algorithm was then introduced by Sun et al.
23 in the following year to optimize the given parameters of a fuzzy sliding mode anti-swing controller. Dynamic differential evolutionary (DDE) algorithm was additionally proposed within this period by the authors as a recommended single objective stochastic optimization technique to attain the optimum parameters for sliding mode controller (SMC) in elevating the performance of an under-actuated crane system.
24 Comparative study in terms of position and swing angle was further undertaken by Solihin et al.
25 in the year 2019 among the current metaheuristic-based algorithms such as PSO, cuckoo search (CS), and differential evolution (DE) towards the optimization of fuzzy controller within a gantry crane system. However, Bayesian optimizer (BO) was especially operationalized by Bao et al.
26 against the PID controller in the year 2020 for the tuning of data-driven model predictive controller (MPC) with absence of analytical model knowledge concerning the implemented crane system. Such was prior to the suggested implementation of fully informed particle swarm optimization (FIPSO) by Valluru et al.
27 within both multi-loop linear-PID and nonlinear-PID controllers of a crane system. However, the tuning of those controllers by metaheuristic optimization algorithms is still in low accuracy and need to be improved. This is because the aforementioned metaheuristic optimization algorithms have a high possibility of the solution getting stuck in local optima. Also, previously discussed literature have merely considered the application of SIMO crane system in view of its relatively lesser tunable parameters.
In retrospect, a contemporary hybrid approach known as MFAC-PDTSFC was introduced by Roman et al.
28 in the year 2019 for the handling of a MIMO nonlinear tower crane system through the incorporation of model-free adaptive control (MFAC) to the proportional-derivative Takagi–Sugeno fuzzy controller (PDTSFC). They then proceeded with the development of first-order active disturbance rejection-virtual reference feedback tuning (ADRV-VRFT) in the ensuing year
29; as well as the hybrid active disturbance rejection control-fuzzy controller in the year 2021,
30 targeting effectual operation of three-degree-of-freedom tower crane systems by implementing fine-tuning of the grey wolf optimizer (GWO). Whilst a MIMO crane system was applied towards these studies, the investigated model has been especially designed in parallel as a single-input–single-output (SISO) system comprising three specified domains of cart, arm angular, and payload. Moreover, employment of an enhanced model-free adaptive control (MFAC) method based on recursive least-squares (RLS) algorithm was introduced by Pham and Soffker
31 in the year 2020 to uplift the effectiveness of a MIMO-ship-mounted crane system, through a performance comparison against the projection algorithm (PA), MFAC, and proportional-integral (PI) controller. Other approaches including the data-driven neuroendocrine-PID (NEPID) control,
32,33 as well as the improved upon sigmoid-based secretion rate NEPID (SbSR-NEPID) control
34 and multiple-node hormone regulation (MnHR-NEPID) control
35 have also been proposed by Ghazali et al. for the handling of MIMO crane system. With majority of the NEPID approaches as proposed within these studies being personalized based on the adaptive safe experimentation dynamics (ASED) algorithm, the enhanced NEPID controllers as observed via latter papers have demonstrated superiority in controlling capacity over its untouched counterpart. Based on the reported data-driven control schemes above, it is evident that the majority of them utilize a metaheuristic optimization algorithm to fine-tune controller parameters. This approach has been shown to offer superior flexibility and effectiveness when applied to the control of complex crane systems. The key advantage of metaheuristic optimization algorithms is their ability to search for global optima stochastically or randomly, without requiring any gradient information. This makes it highly likely that the solutions found will avoid becoming trapped in local optima and converge to the global optimum instead. As a result, metaheuristic optimization algorithms are an excellent choice as a data-driven tool for identifying optimal controller parameters across a wide range of crane systems, delivering highly accurate trajectory control with minimal swing angle.
Among others, current advocacy is particularly allocated on the marine predators algorithm (MPA) as a contemporary metaheuristic-based algorithm for optimization of data-driven control scheme within a MIMO crane system.
36 Designed and introduced by Faramarzi et al. in the year 2020, the MPA algorithm is known for its nature-inspired metaheuristic setting which replicates the strategic foraging of ocean predators with accounts for the inter-relationship between both preys and predators. MPA stands out from other popular metaheuristic optimization algorithms due to its unique approach to balancing the tradeoff between Levy and Brownian walks. This is achieved by leveraging Levy walks to enhance the exploitation phase and Brownian walks to boost the exploration phase. Another distinguishing feature of MPA is its simple configuration, with only two coefficients requiring adjustment. In addition, the optimization process is divided into three main phases, with considerations for environmental issues and marine memory. These design elements contribute to a lower computational burden, resulting in faster convergence speeds. Due to these advantages, there is a large volume of published studies describing the role of the MPA in solving the optimization problems in various fields. For example, the MPA was used by Elminaam et al.
37 in feature selection problems to improve classification accuracy. Here, they hybrid the MPA with k-Nearest Neighbors (k-NN) called MPA-KNN to evaluate the medical dataset benchmarks. Likewise, the MPA was applied to the renewable energy sector towards fine-tuning its sensory requirement through fuzzy-logic–based maximum power point tracking (MPPT) scheme.
38 Thereafter, the algorithm was studied by Soliman et al.
39 for the appropriate extraction of electrical parameters for the triple-diode photovoltaic (TDPV) model of a photovoltaic (PV) panel. A hybrid approach between MPA and moth-flame optimization (MFO) was adopted for the optimization of multi-level threshold (MLT); in turn, boosted the image segmentation ability of CT-images against the COVID-19 pandemic.
40 Such far-reaching optimization preference is brought forward to the control engineering sector, with reviewed literature proposing the use of MPA in the tuning of cascaded proportional-integral-derivative-acceleration (PIDA) controller within interconnected power systems.
41 This has been similarly reflected in the context of infinite bus power system and IEEE-39 bus system, following the algorithm’s role as an optimizer in the PID cascaded controller.
42 MPA was further regarded by Sobhy et al. as an effective optimizer in attainment of optimum PID gains for the load frequency control of modern interconnected power systems.
43 On another note, effectiveness of the algorithm was exploited as a tuning approach incorporated within the damping controller for enhanced consistency of small-signal within a high wind integrated system.
44 Previous discussion has indisputably highlighted MPA as an effective optimization approach which outshined a number of other modern metaheuristic-based algorithms, for multitude resolutions of control and operational problems in the engineering sector. Such prominence is genuinely constructed above the overshadowing convergence accuracy as yielded by the algorithm of interest over its competing rival for majority of the benchmark functions.
36 Its potential as an excellent optimization algorithm for the control of a MIMO crane system is, therefore, justified. This is, yet, on the account of the approach’s operational limitation with possessing an extreme entrapment possibility within the local optima. This is because during the transition from exploration to exploitation in Phase 2 of algorithm operationalization, each prey updates its location at each iteration only based on either its previous location or the location of the current best predator. If the location of the current best predator suddenly traps in local region, it may pull other preys to be trapped in the same region. Similarly, if the current location of the prey is suddenly trapped in the local optima region, it is difficult for it to jump out from the region since it mostly depends on the information of its previous location. Alternatively, conducted preliminary investigation has especially highlighted overly hindering nature of the existing adaptive coefficient towards step size control (defined as
CF),
36 which undermined MPA’s proficiency in the balancing of exploration and exploitation phases. Therefore, the implementation of an unadjusted MPA algorithm in a MIMO crane system would merely generate subpar control performance.
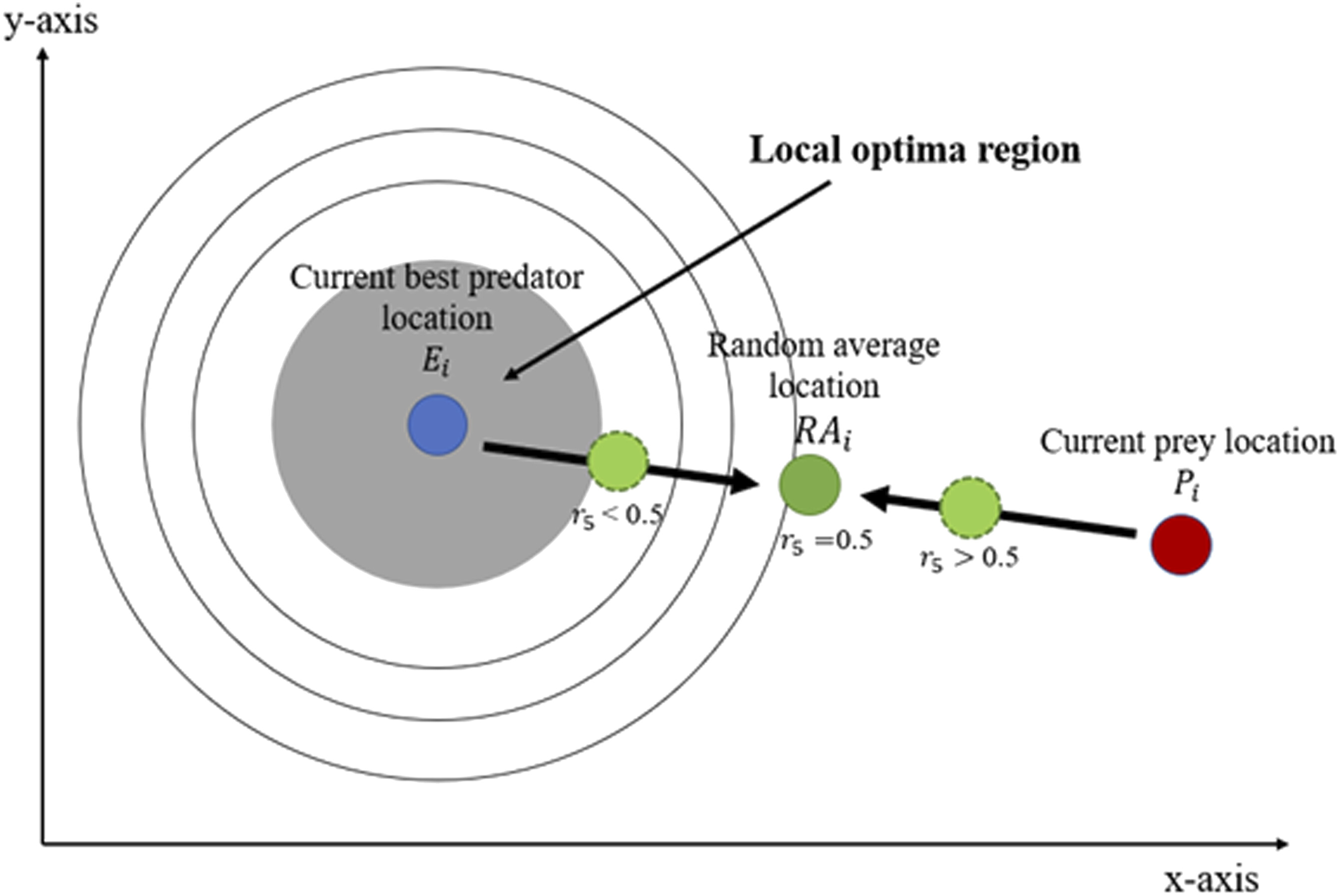
Tackling the emerged shortfalls of MPA, random average marine predators algorithm (RAMPA) with tunable adaptive coefficient for the controlling of step size (CF) is hereby proposed. The introduced algorithm consisted RAMPA as its principal component which capitalizes computation of random average between both the current preys’ and the current best predator’s locations to confront local optima issue during Phase 2 of algorithm operationalization. Specifically, both of prey and predator within the outlier could avert their respective entrapments by assistance from both current best predator and current preys. Peripheral component of the proposed algorithm further comprised tunable CF to improve a balance between exploration and exploitation phases. Set to overcome the restrictive nature of MPA, increased flexibility is enabled via the proposed method towards maintaining a balanced exploration and exploitation phases; in which, cumulatively encourages searching competency.
Based upon the given arguments, random average marine predators algorithm (RAMPA) with tunable adaptive coefficient for controlling the step size (
CF) has been strategically unveiled within this paper for the fine-tuning of data-driven multiple-node hormone regulation of neuroendocrine-PID (MnHR-NEPID) within a MIMO gantry crane system. Such step is taken to exploit the algorithm advantage of resolving local optima entrapment, as well as the issue of unbalanced segregation between the exploration and exploitation phases. Replicated upon the reported work in refs.
34,
35, the MnHR-NEPID controller is particularly chosen for its overpowering precision and synergy between multiple nodes hormones, over a standard NEPID controller and the SbSR-NEPID in the controlling of the specified MIMO system. With ASED algorithm as proposed in the earlier paper being founded upon both local search principle and an extreme reliance on feasible selection of initial control parameters, an indefinite global optimal solution from said algorithm has fundamentally propelled consecutive investigation of RAMPA-based method with tunable
CF towards similar research circumstance. Assessments are further made in regards to the convergence curve and statistical analysis of fitness function, the total norm of error and the total norm of input, findings as obtained from the Wilcoxon’s rank test, time responses, followed by performance appraisal in the presence of external disturbance. Statistical comparison is consequently attempted alongside the conventional MPA, as well as other preceding algorithms including PSO, GWO, MFO, multi-verse optimizer (MVO), sine-cosine algorithm (SCA), salp-swarm algorithm (SSA), slime mould algorithm (SMA), and flow direction algorithm (FDA). Additionally, the ASED-based method as examined in ref.
35 has been especially measured against the proposed algorithm in pursue of the superior approach. Key contributions of the current work, thus, include:
(i) A random average location calculation is proposed in RAMPA, which will help the MPA to escape from the local optima. The merit of the random average location between prey and current best predator is that the location of the current best predator or the location of the current prey can help any trapped prey or predator to jump out from the local optima region and continue a new search track.
(ii) Search competency of the conventional MPA is improved ensuing incorporation of tunable CF which permits greater users’ freedom or flexibility towards balance in exploration and exploitation stages.
(iii) The current study essentially pioneered the implementation of multi-agent–based optimization (i.e., RAMPA based method with tunable CF) for the fine-tuning of MnHR-NEPID controller. Results as registered from the proposed algorithm further dominated its significant excellence over other recent multi-agent–based methods, such as FDA, SMA, SSA, and MVO.
The remaining sections of this paper are coordinated as follows: The second section specifies on discussion of the conventional MPA-based method and the contemporarily proposed RAMPA-based method with tunable CF. The third section is then purposed for problem formulation concerning employment of the MnHR-NEPID controller within a MIMO gantry crane system, followed by the systematic outlining of required procedure towards employment of the proposed method for performance optimization. Effectiveness of the proposed method is further validated in the fourth section. Last but not least, concluding remarks concerning the entire research are given in the fifth section.
Implementation and results
The current section discusses appraised performance of the MIMO gantry crane control system with employment of MnHR-NEPID controller fine-tuned using the proposed RAMPA-based method with tunable
CF. Comparison is fundamentally made between effectiveness of the proposed approach, the conventional MPA-based method, and other existing metaheuristic-based algorithms, viz. PSO,
48 GWO,
49 MFO,
50 MVO,
51 SCA,
52 SSA,
53 SMA,
54 and FDA.
55 Recorded outcomes from the introduced RAMPA-based method with tunable
CF are further evaluated against the formerly published ASED-based method.
35 Performances of the examined algorithms are essentially assessed by virtue of the following criteria
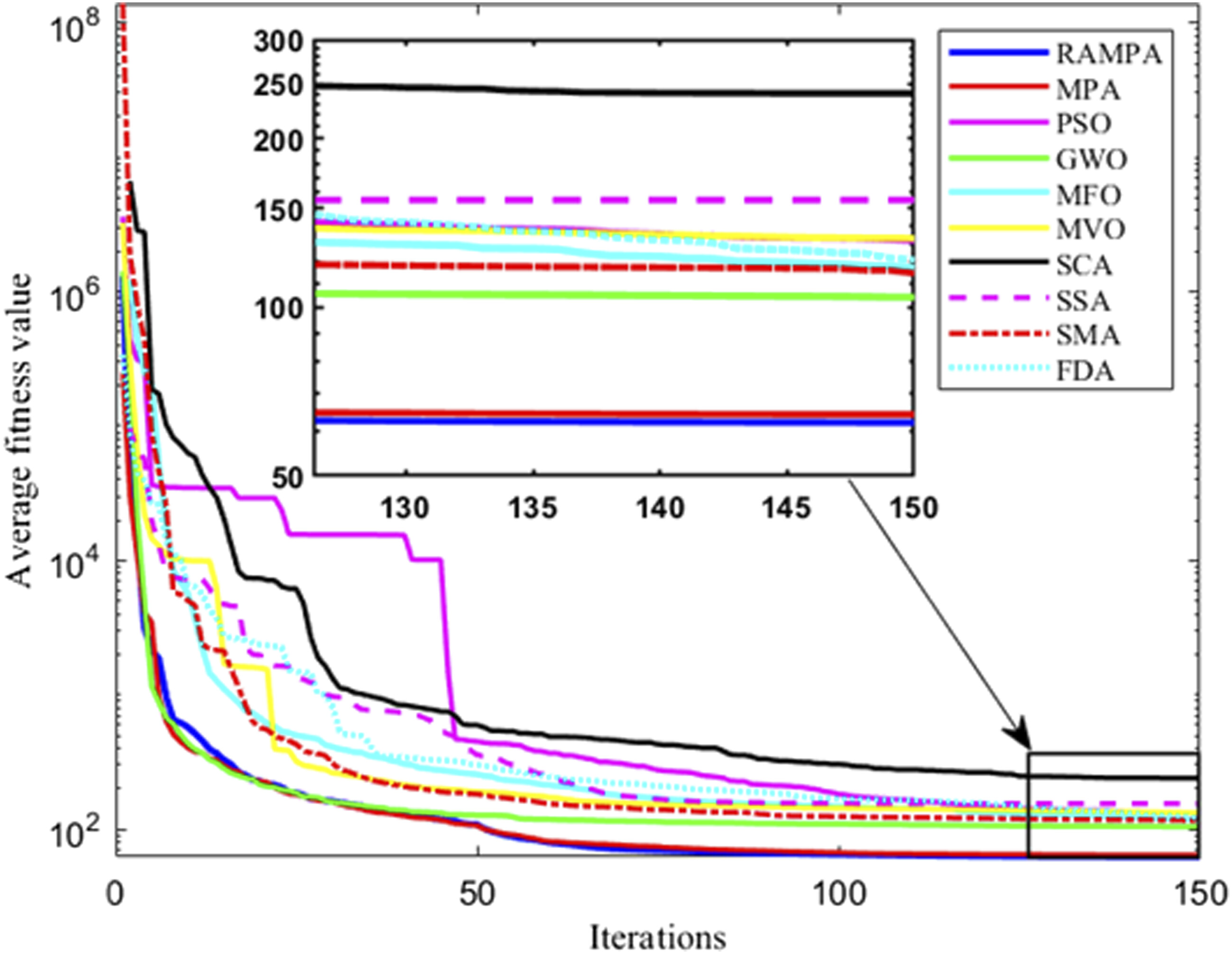
1. Convergence curves of average fitness function (out of 25 trials) as generated from RAMPA-based method with tunable CF and the conventional MPA, PSO, GWO, MFO, MVO, SCA, SSA, SMA, and FDA-based methods are contrasted. Inspection is especially made on the algorithms’ capacities to minimize their generated fitness function.
2. Fitness function
from equation (
31), the total norm of error
, and the total norm of input
as acquired through 25 independent trials with reference to the mean, best, worst, and standard deviation (std.) are statistically evaluated. As per mentioned, comparison is undertaken between the obtained statistical analysis from RAMPA-based method with tunable
CF, the conventional MPA-based method, and the formerly stated algorithms.
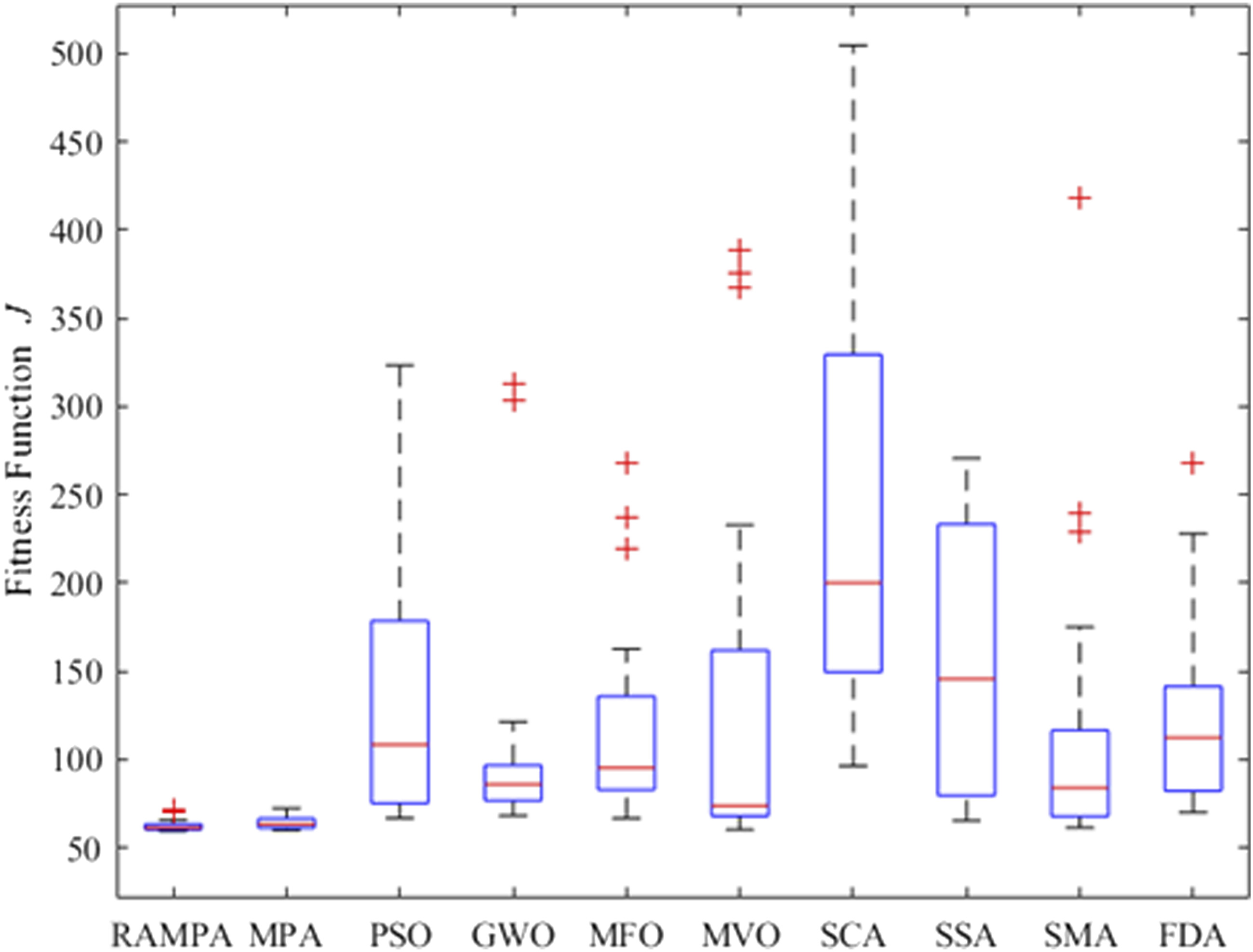
3. Non-parametric statistical analysis by employment of the Wilcoxon’s rank test is pursued to engage the statistical dissimilarity between examined algorithms at a significance level of 5%. Statistical test is essentially proceeded between a pair of distinct algorithms by primarily contrasting their respective mean values to observe the significance level based on its . Significant divergence is established between simulated outcomes and efficiency of respective algorithms in the case where . On the contrary, divergence between simulated outcomes of respective algorithms is deemed insignificant in the case where . Additionally, the box plot is considered to evaluate the precision of the algorithms.
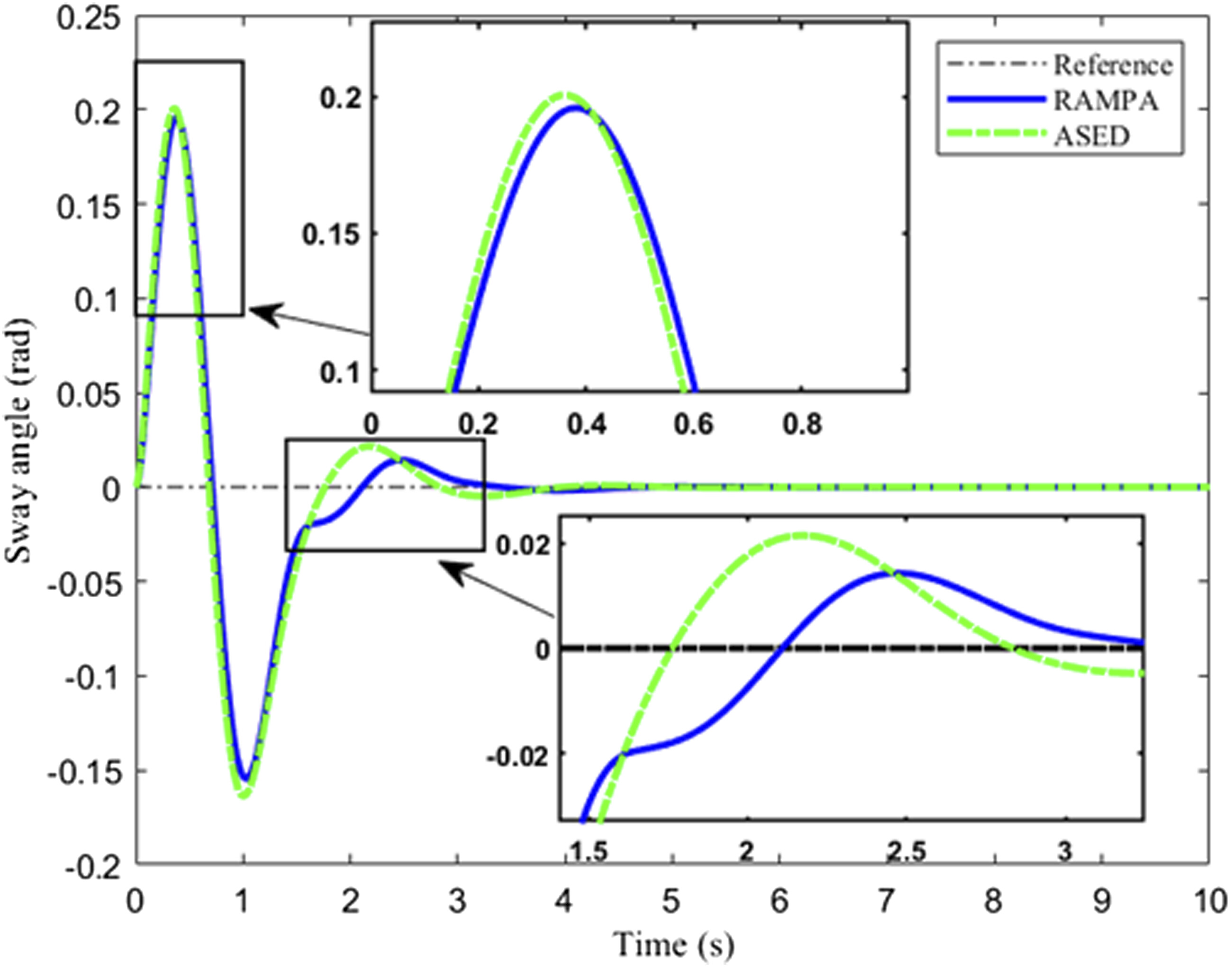
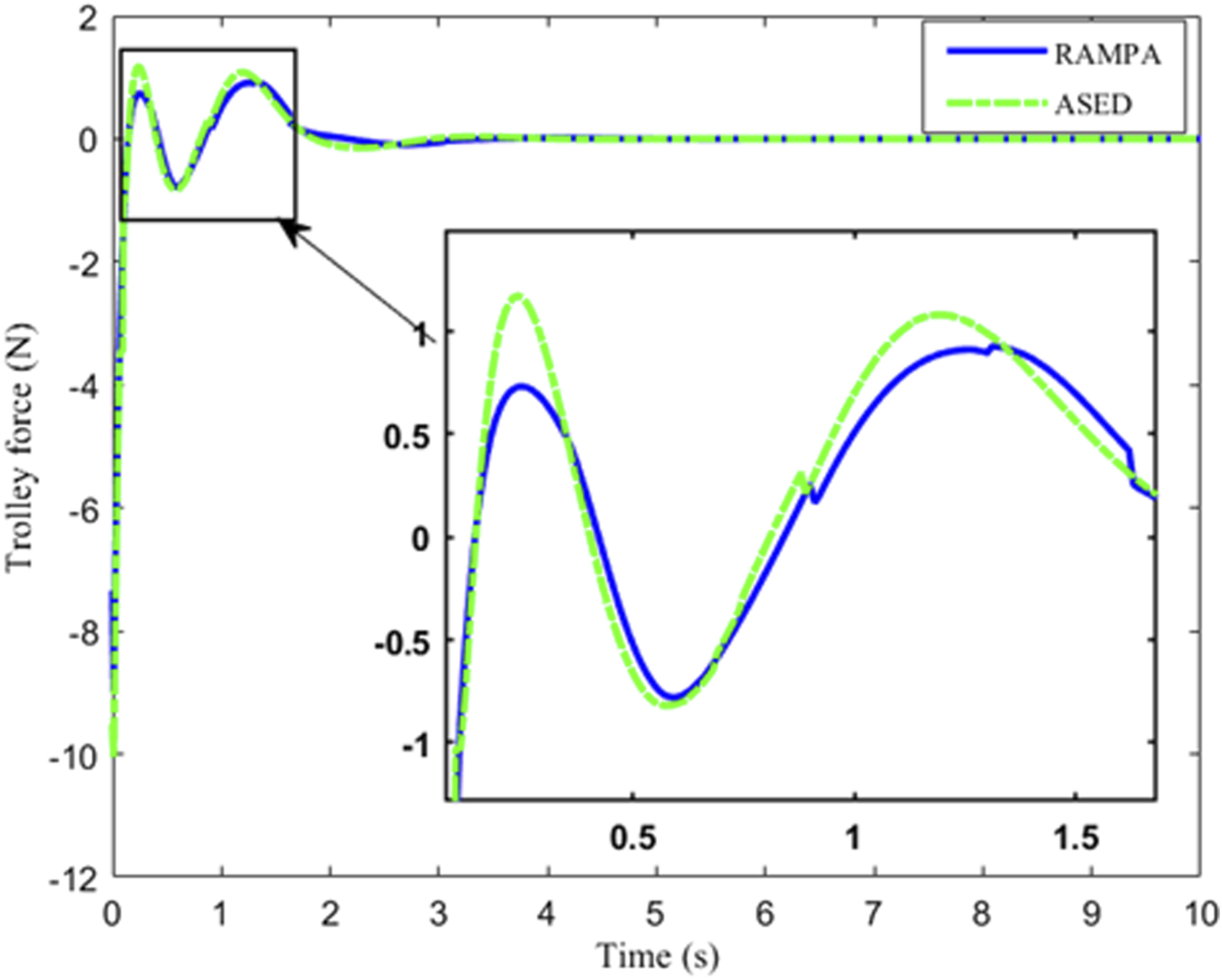
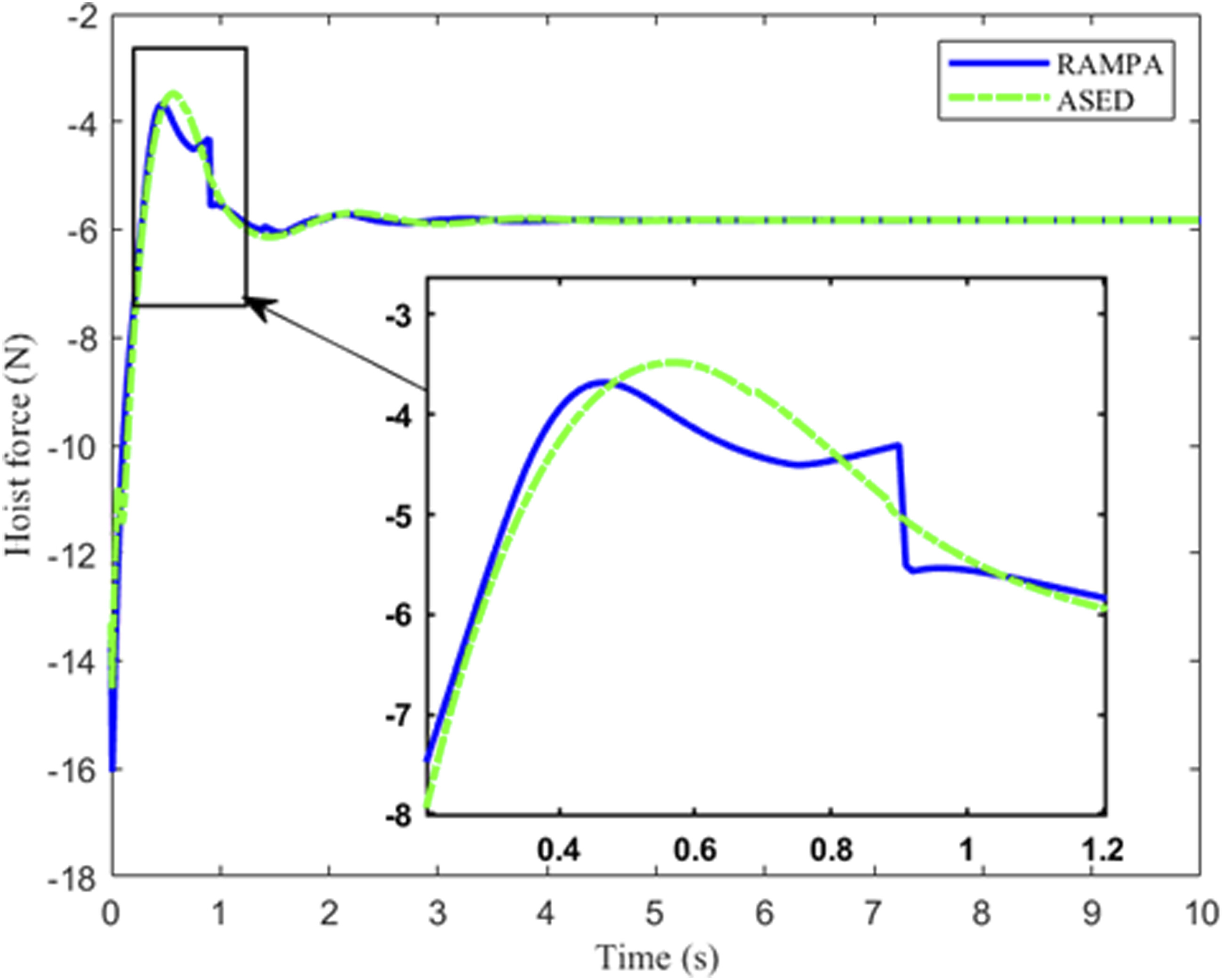
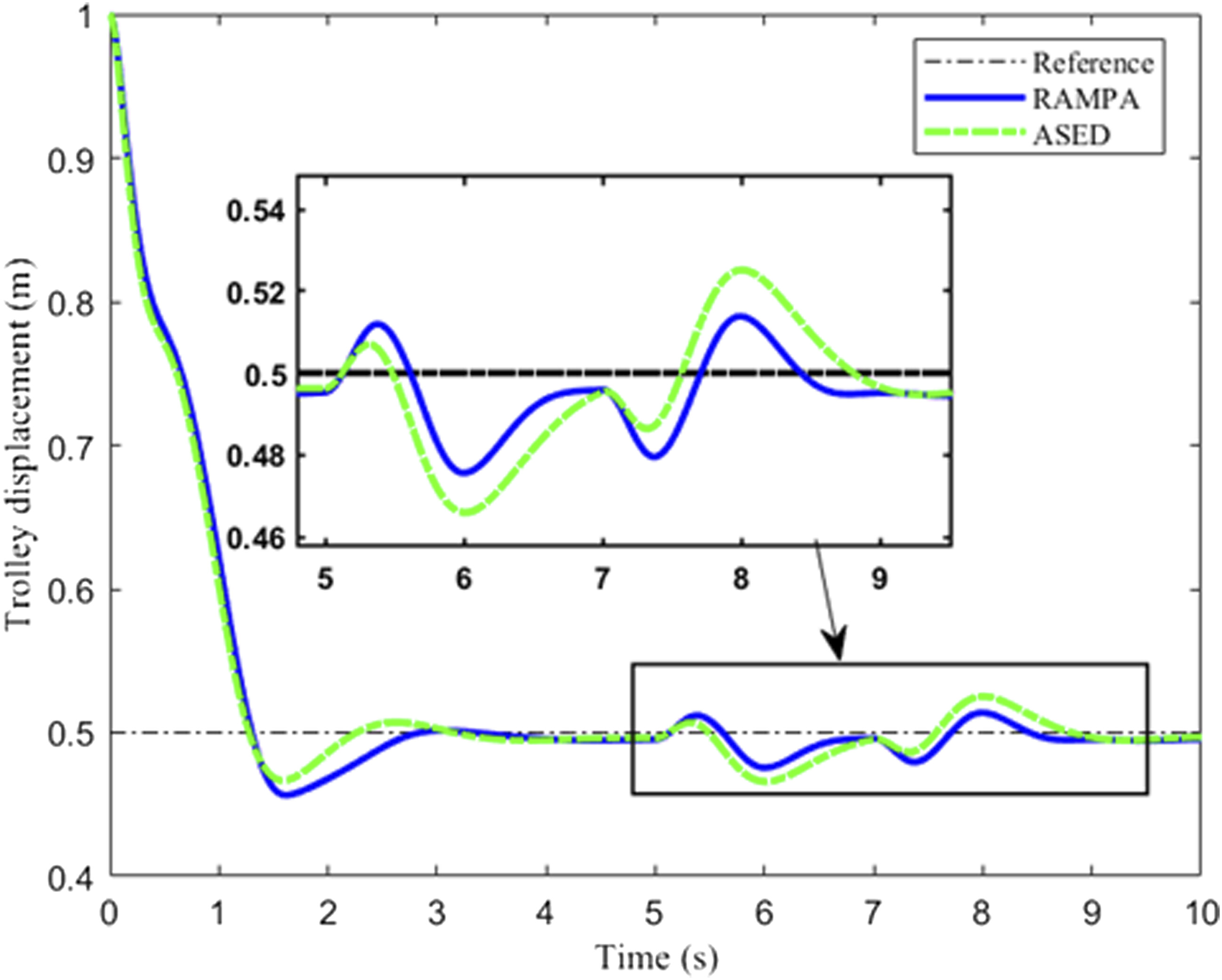
4. Time responses analysis of MIMO gantry crane system as acquired through employment of the proposed RAMPA-based method with tunable
CF and the preceding ASED-based approach
35 are appraised with respect to its trolley displacement
, length of the rope
, sway angle of the payload
, trolley force
, and hoist force
.
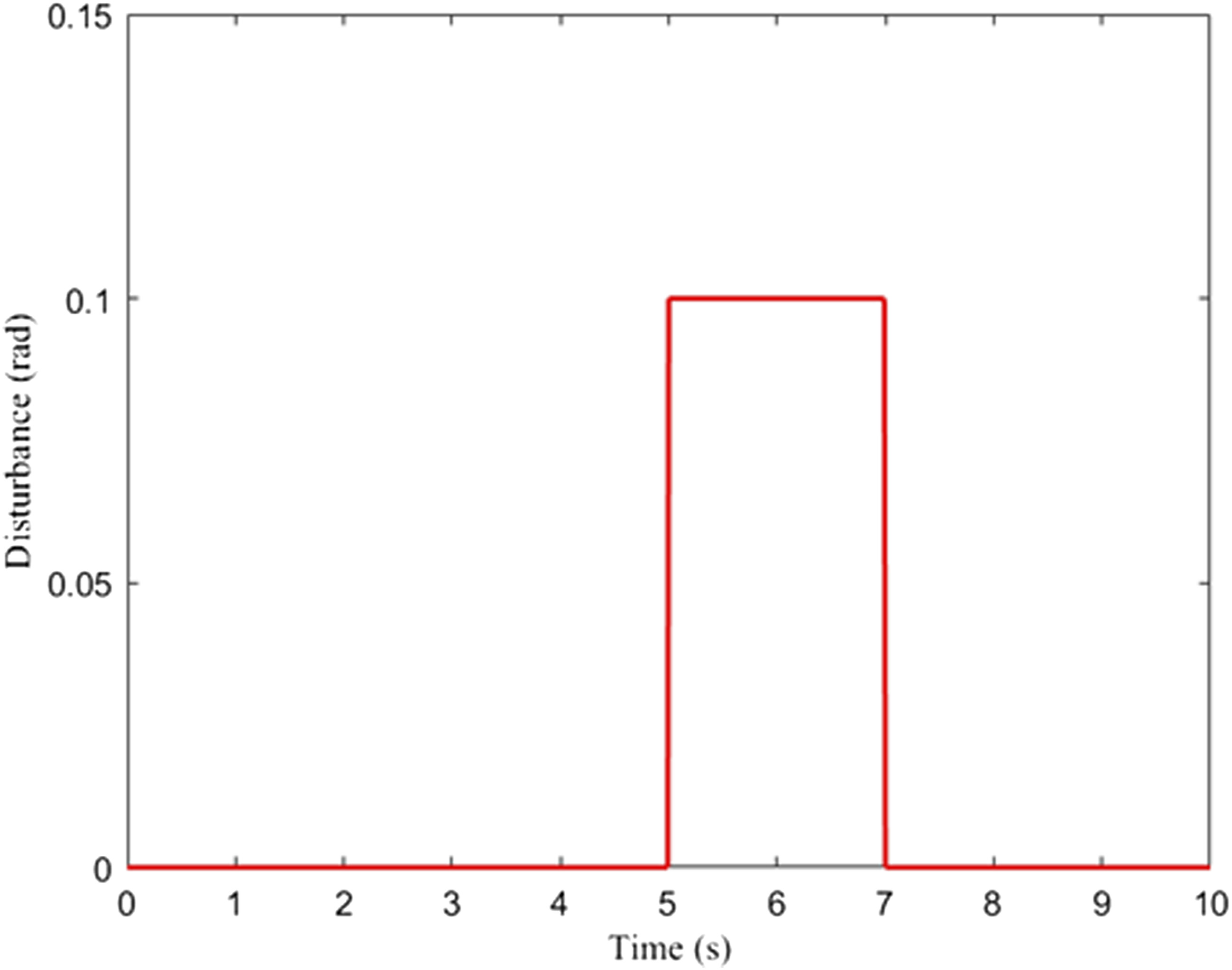
5. Robustness of the MnHR-NEPID controller as optimized using the RAMPA-based method with tunable
CF and the ASED-based method
35 is assessed with introduction of external disturbance to the MIMO gantry crane system.
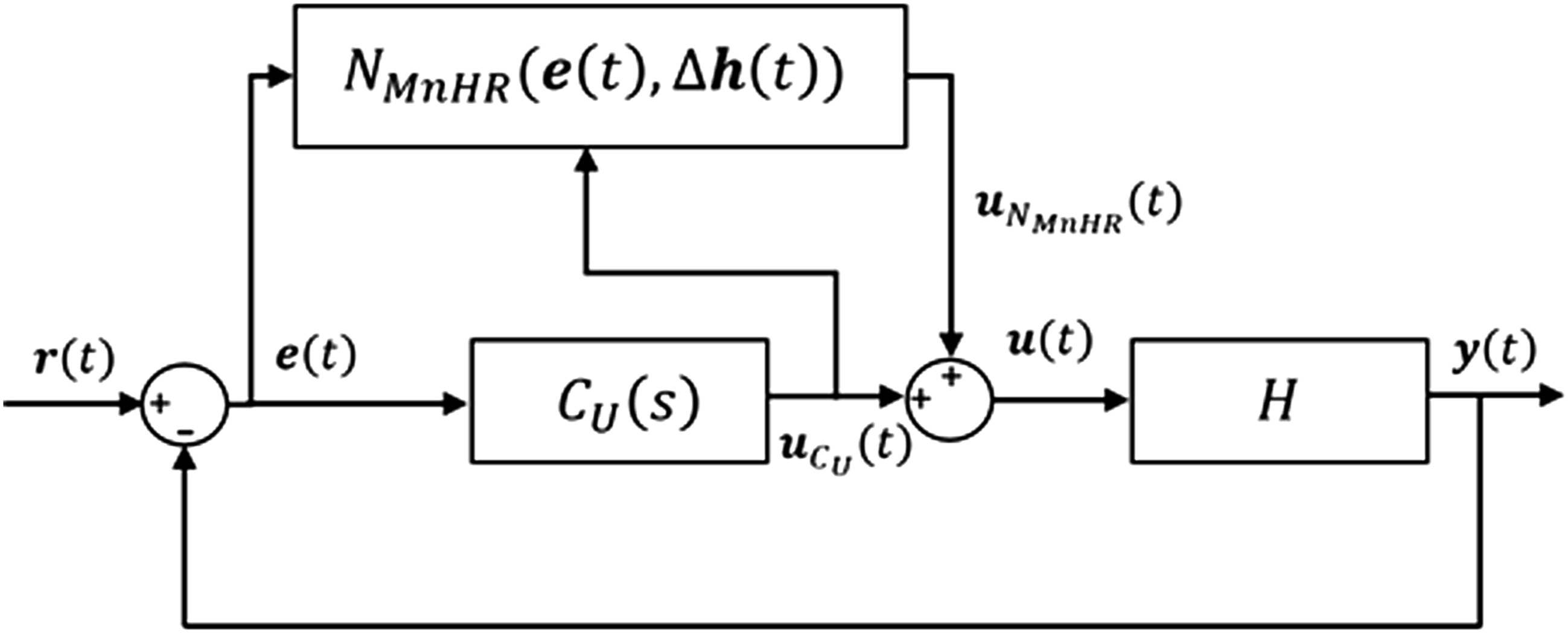
Attempted simulations for the current study were performed based on MATLAB/Simulink R2020a using a personal computer equipped with the specification of Microsoft Window 10, 8 GB RAM and Intel Core i7-6700 Processor (3.41 GHz). The MnHR-NEPID control system as outlined in
Figure 4 has been explicitly adopted for the control of MIMO gantry crane system in
Figure 3 at a total number of outputs
and inputs
. Respective inputs and outputs of the studied system are further signified by
,
,
,
and
. As opposed to the previous work in ref.
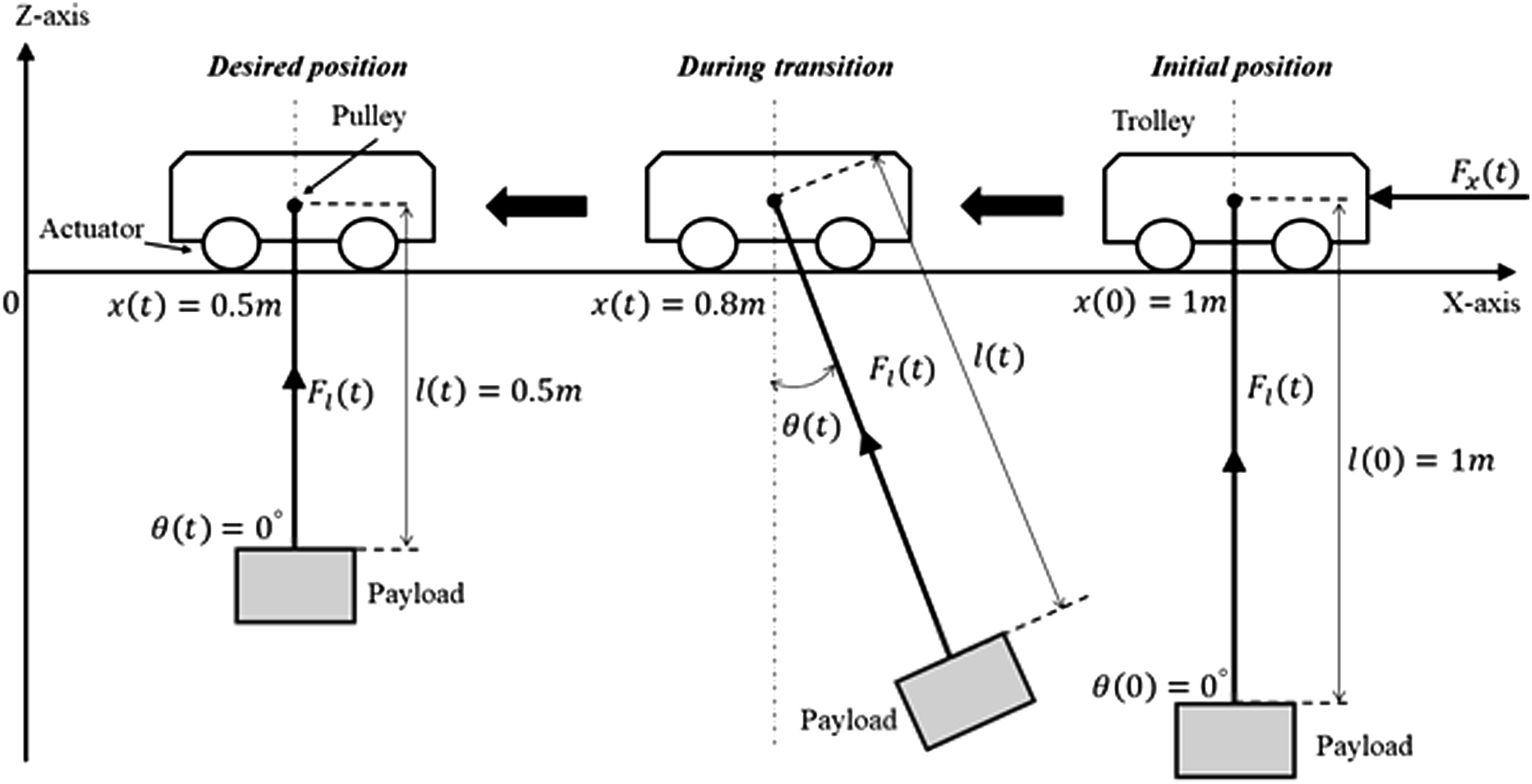
35 which considered a trolley displacement from 1 m to the origin and a rope’s length adjustment from 1 m to 0.2 m, a shorter trolley displacement and adjustment of the rope’s length is accounted for the current research at a reduced simulation time to minimize the required computation duration for the system’s tuning. With this in mind, the desired trolley’s position, length of the rope, and sway angle are then considered as
with initial position of the trolley, length of the rope, and sway angle of the payload being independently given at
,
, and
. Heightened clarification is further expressed through
Figure 6 which comprehensively illustrates the trolley’s movement and the rope’s length adjustment approaching their desired positions. As observed, initial position of the trolley has been determined at 1 m from the origin, with initial length of the rope being conjointly determined at 1 m. Thereafter, the trolley’s actuator is maneuvered forwarding the left sided direction approaching its desired position of 0.5 m. In the meantime, adjustment is also undertaken by the installed pulley on the rope towards the desired length of 0.5 m. With both swaying and oscillation of the involved payload being discernable throughout the trolley’s maneuver between both locations; this study, nonetheless, aims in transferring the payload to its desired position at a minimal sway angle.
MnHR-NEPID controller for the MIMO gantry crane system from
Figure 4 has been fundamentally considered as
and
With reference to equation (
20), four design parameters for each
controller are hereby accounted. Likewise, four other design parameters as stated in equations (
22)–(
26) are alternatively considered for each of the
controller. Corresponding to
, a total number of 24 design parameters are then contemplated for the employed MnHR-NEPID controller. Initial position of each design parameter has further been randomly assigned in accordance to the previous discussion in Section 2.1 to enable increased possibility among agents for the exploration of search domains within their predetermined boundary. Implementation of the proposed RAMPA-based method with tunable
CF, thus, bypassed the time-consuming complicatedness of tedious preliminary investigations as operationalized in ref.
35 towards determining feasible initial design parameters of the chosen controller. Objectively, the fitness function in equation (
31) is minimized by obtaining
, with the weighting coefficients being set at
,
,
,
, and
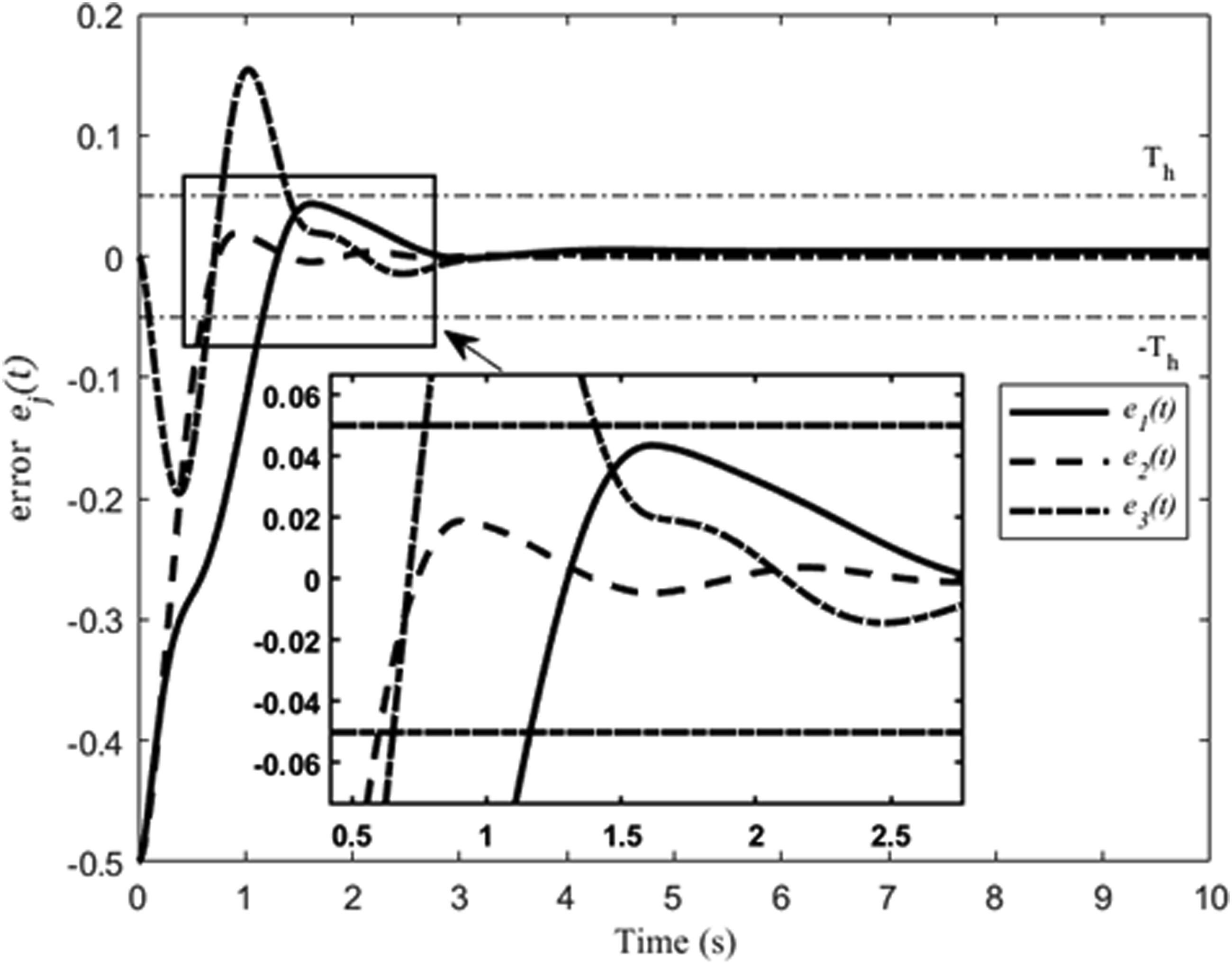
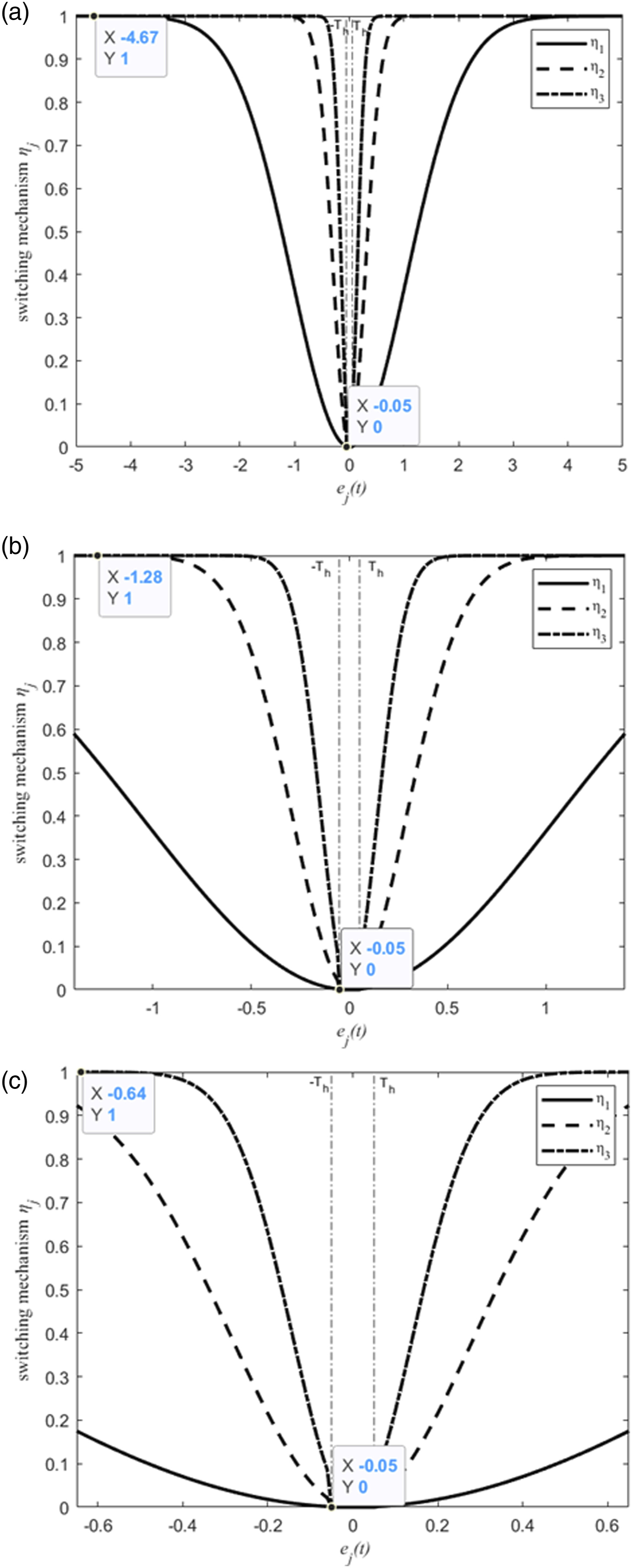
to reflect the circumstance of Ref.[35]. The error threshold
as included in equation (
25) is similarly identified to such condition at a value of 0.05. Nevertheless, the simulation time in ref.
35 has been halved for the current study to a designated interval of
s. In view of the optimization related settings, both the upper bound and lower bound for each design parameter have been primarily determined at the values of
and
. The maximum number of iterations and the number of agents are further determined at
and
, respectively. Such settings essentially contributed a total of 3000 number of function evaluations (NFE). Several preliminary investigations subsequently established the coefficient for RAMPA-based method with tunable
CF at a value of
= 0.8. Default coefficients of the MPA-based method are ultimately maintained succeeding implementation of the RAMPA-based method with tunable
CF at
= 0.5 and
= 0.2. With each statistical element in place, 25 independent trials under the identical set of coefficients were simulated to appraise the robustness of RAMPA-based method with tunable
CF against the randomization effect. Meanwhile, the coefficients of other existing algorithms as examined in this paper, comprising the PSO, GWO, MFO, MVO, SCA, SSA, SMA, and FDA-based methods, are thoroughly tabulated in
Table 1.