GWO is favored for UAV path planning due to its simple structure and minimal parameter tuning requirements. However, it faces limitations such as slow convergence and susceptibility to local optima, which are exacerbated in complex mountainous transport scenarios characterized by unstructured terrain, dynamic obstacles, and large-scale search spaces. To address these problems, an AIGWO is proposed. In order to accelerate convergence of the algorithm, an adaptive search strategy based on an adaptive decay factor and search method is designed. And a candidate position updating strategy based on dimensional learning is designed to jump out of the local optimum. The following section will describe in detail.
GWO
GWO simulates the social hierarchy and hunting behavior of grey wolf packs, with four hierarchical roles (
) corresponding to the optimal, suboptimal, third-best, and remaining solutions. The hunting process is mathematically modeled through position updates guided by
, and
wolves, with core formulas defined as:
Where
and
denote the position vectors of grey wolves and prey, respectively;
t and
T represent the current and maximum iterations;
a is the linear decay factor;
and
are random vectors within [0,1];
and
are the exploration and random weight coefficients. The position update of
wolves is guided by
, and
wolves:
Where are positions derived from , and wolves, respectively. Despite its simplicity, GWO lacks adaptability to mountainous transport scenarios, leading to insufficient diversity and premature convergence.
Adaptive search strategy
To enhance AIGWO's adaptability to complex mountainous terrain characterized by rugged landform and scattered obstacles, an adaptive search strategy is designed to dynamically balance global exploration and local exploitation. Global exploration targets traversing large-scale unstructured terrain, while local exploitation focuses on optimizing path quality. Integrated into this strategy are adaptive decay factor adjustment based on iteration progress and population diversity, multi-scale search methods, and simplified Levy flight, which collectively enhance the algorithm dynamic responsiveness and search efficiency and accuracy in path planning.
Adaptive decay factor
Instead of the linear decay of
a in traditional GWO,
31 a diversity-aware decay factor
is adopted to adapt to the dynamic distribution of mountainous terrain. The diversity ratio
is calculated based on inter-individual distances to reflect population dispersion:
Where and are the current and initial average inter-individual distances. The base decay decreases linearly with the number of iterations. is constrained within [0.1, 2] to ensure stability: a larger enhances exploration when the population is dispersed, adapting to unknown mountainous areas, while a smaller accelerates exploitation when the population aggregates, optimizing paths in known safe zones.
Adaptive Search Modes
A single search mode fails to balance efficiency and comprehensiveness in complex mountainous transportation. Three adaptive search modes are designed, switched based on the positional relationship between the leading wolf and potential optimal paths to improve search flexibility and accuracy. The key modes and their calculations are as follows:
(1) Initial search: Guides the swarm towards potential optimal paths by weighting the top three wolves, accelerating early convergence in unknown mountainous areas:
(2) Breadth search: Expands the search scope by referencing the swarm's average position, suitable for exploring wide mountainous regions and maintaining population diversity:
Where is the position of the alpha wolf at iteration t; is the average position of the swarm; controls exploration intensity; and introduces randomness.
Where denotes the position after iterations and denotes the position of wolf after the t iteration. is explored through controlled iterations. denotes the average of all positions after the t iteration. is a random number in the interval [0,1].
(3) Depth search: Adopts simplified Levy flight for precise path optimization near mountain obstacles, avoiding local optima:
Where
denotes the position after
iterations.
is the Levy flight distribution function,
32 and
D denotes dimension. It is calculated as follows:
Where
.
is computed as follows:
Where is the conventional gamma function. A random is selected in each Levy flight iteration, generating numerous short jumps. This random adjustment enhances both exploitation and exploration capabilities during iteration, enabling precise path optimization in complex mountainous terrain.
The three modes are switched adaptively: initial search for early global scanning, breadth search for maintaining diversity in wide areas, and depth search for local obstacle avoidance, matching the multi-scale characteristics of mountainous transportation tasks.
Candidate position update strategy
To address slow convergence and premature loss of population diversity for mountainous UAV path planning, a dimensional learning-based candidate position update strategy is proposed. This strategy constructs a neighborhood space for each search agent to enhance diversity, avoid local optima, and guide convergence to optimal paths.
Specifically, normalized weights are adaptively allocated using the tanh function and hierarchical coefficients to balance global exploration and local exploitation, with weight calculations as follows:
Where denote the acclimatization values of wolves. denotes the fitness value of the current individual . are the position of wolf and is the very small value to prevent the denominator from being zero.
The balance between exploration and exploitation efficiency is achieved by exponential decay to control the search radius. The radius is calculated as follows:
Where is the initial radius determined by the path space bounds and , is the decay rate, is the minimum radius, t is the current iteration, and T is the maximum iteration.
To optimize neighborhood search efficiency in sparse mountainous areas, global elite individuals are precomputed as backup neighbors, with the global fitness sorting and empty neighborhood handling defined as:
Where F is the fitness vector of all individuals, is the sorted fitness index, is the dynamic neighborhood, and (top 10% elite individuals). Neighboring individuals are selected probabilistically to introduce directional diversity, with dimension-independent perturbations to avoid inter-dimensional coupling.
The fitness translation, selection probability calculation, and dimensional learning position update are given by:
Where is the translated fitness value ensuring positivity, is the selection probability (uniform distribution if abnormal), is the roulette-selected neighbor index, is a random individual index, and is the perturbation strength.
Boundary-crossing positions are pulled back into the feasible region via mirror reflection to ensure path feasibility:
Where is the position to be processed, and are the path bounds.
Finally, the optimal candidate position is selected by comparing the fitness of
and
:
This integrated strategy combines the advantages of leading wolf guidance and dimensional learning, ensuring both convergence speed and diversity in complex mountainous path planning.
In traditional GWO, wolves are guided solely by the leading wolf, leading to slow convergence and premature loss of diversity in complex mountainous path planning. A candidate position update strategy based on dimensional learning is proposed to construct a neighborhood space for each search agent, enhance population diversity, and avoid local optima while guiding convergence to optimal paths.
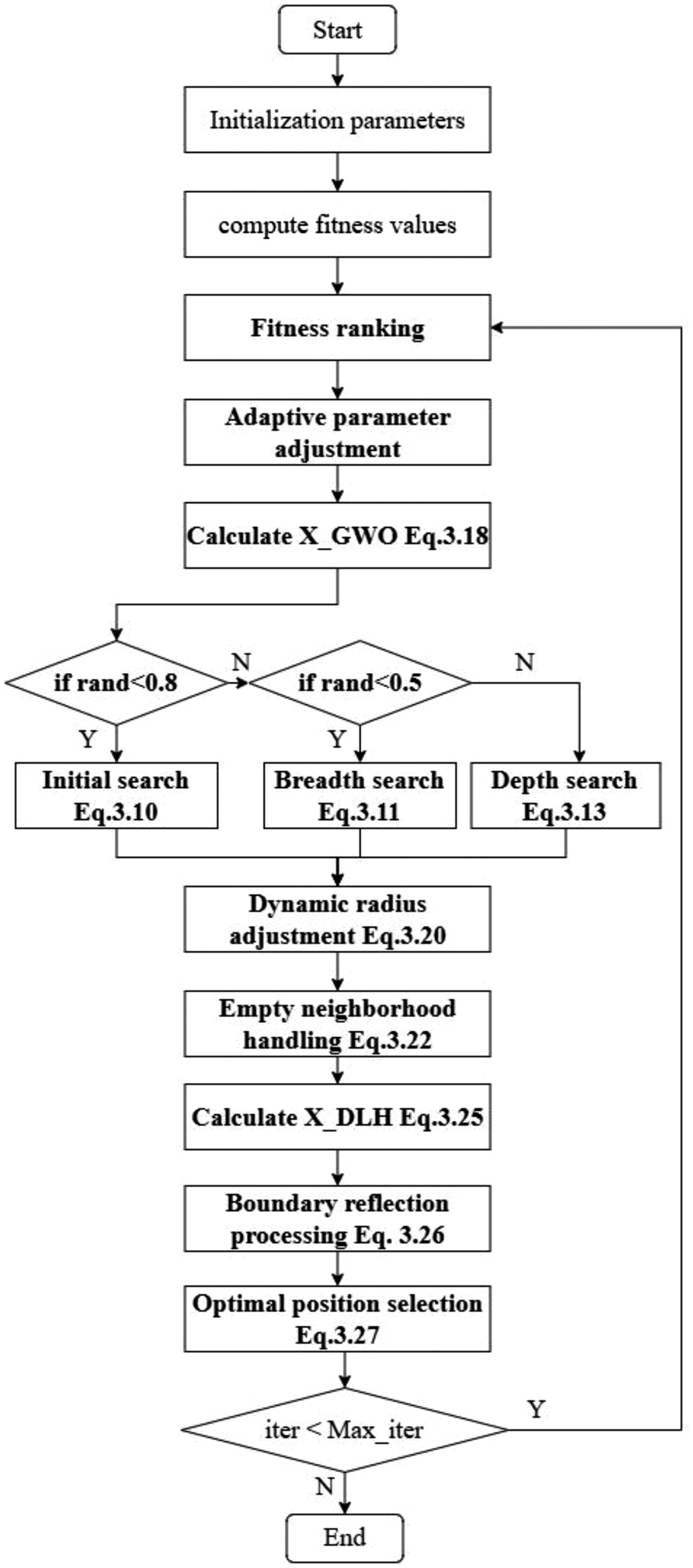
AIGWO algorithm flow
The flow of the AIGWO algorithm for UAV mountainous transportation path planning is illustrated in
Figure 1, and the main steps are described as follows:
Set the maximum number of iterations
T, population size
N, upper/lower bounds
, and other parameters. Randomly generate the initial positions of the wolf pack and compute the fitness values in parallel.
Sort the fitness values, record the positions
and fitness values of the top three wolves.
Step 3: Adaptive parameter adjustment.
Calculate the population diversity ratio
and adjust the decay factor
using (equations (22)–(24)). Compute the
through dynamic weight assignment (equation (33)).
Step 4: Search method switching.
Probabilistically select one of the initial, breadth, or depth search modes and update the positions of the wolves accordingly (equations (25), (26) and (28)).
Step 5: Candidate position generation.
Compute
dynamic radius adjustment, empty neighborhood handling, and neighbor selection (equations (35), (37) and (40)). Apply boundary reflection processing to keep solutions within feasible bounds (equation (41)).
Step 6: Optimal position selection.
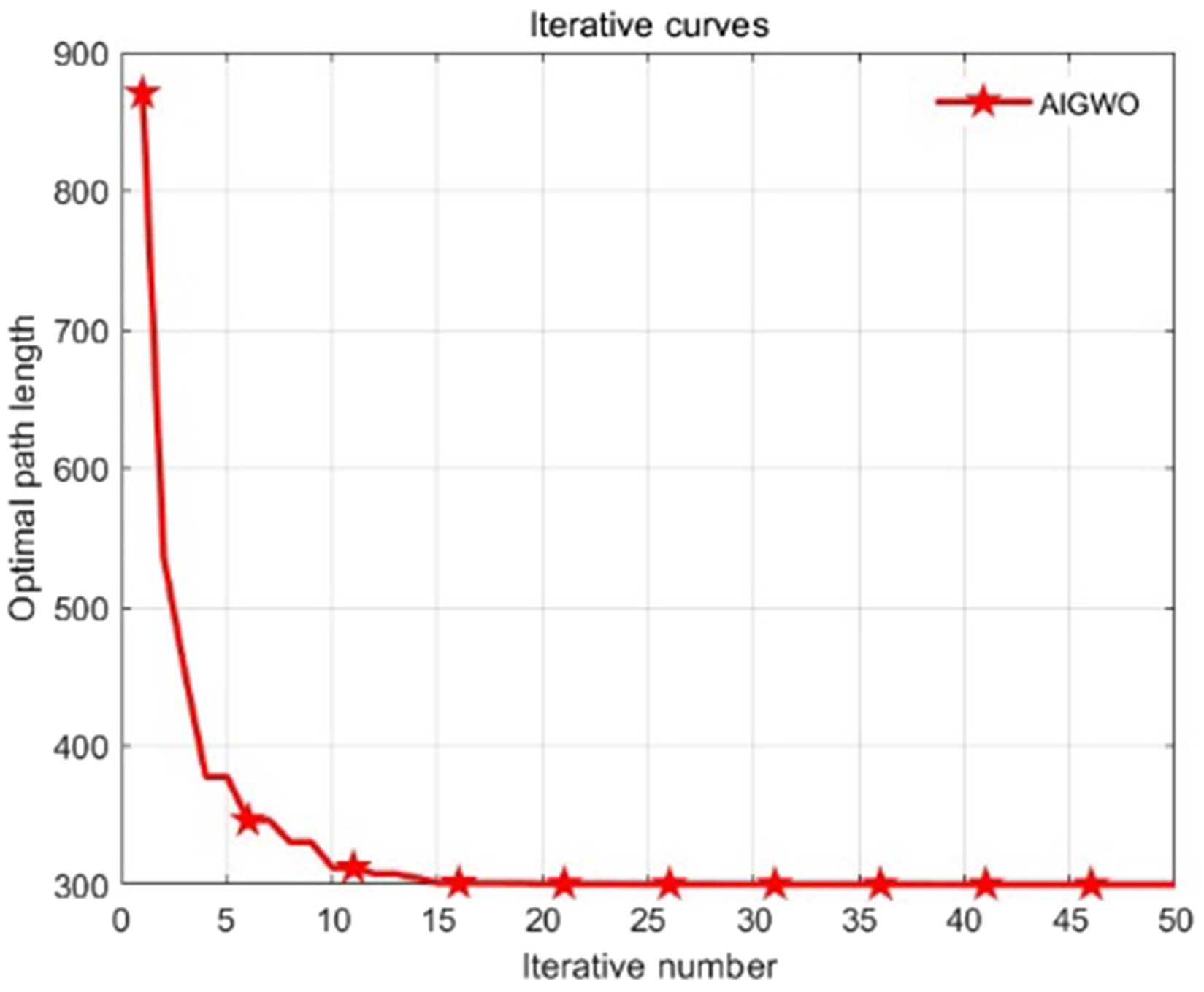
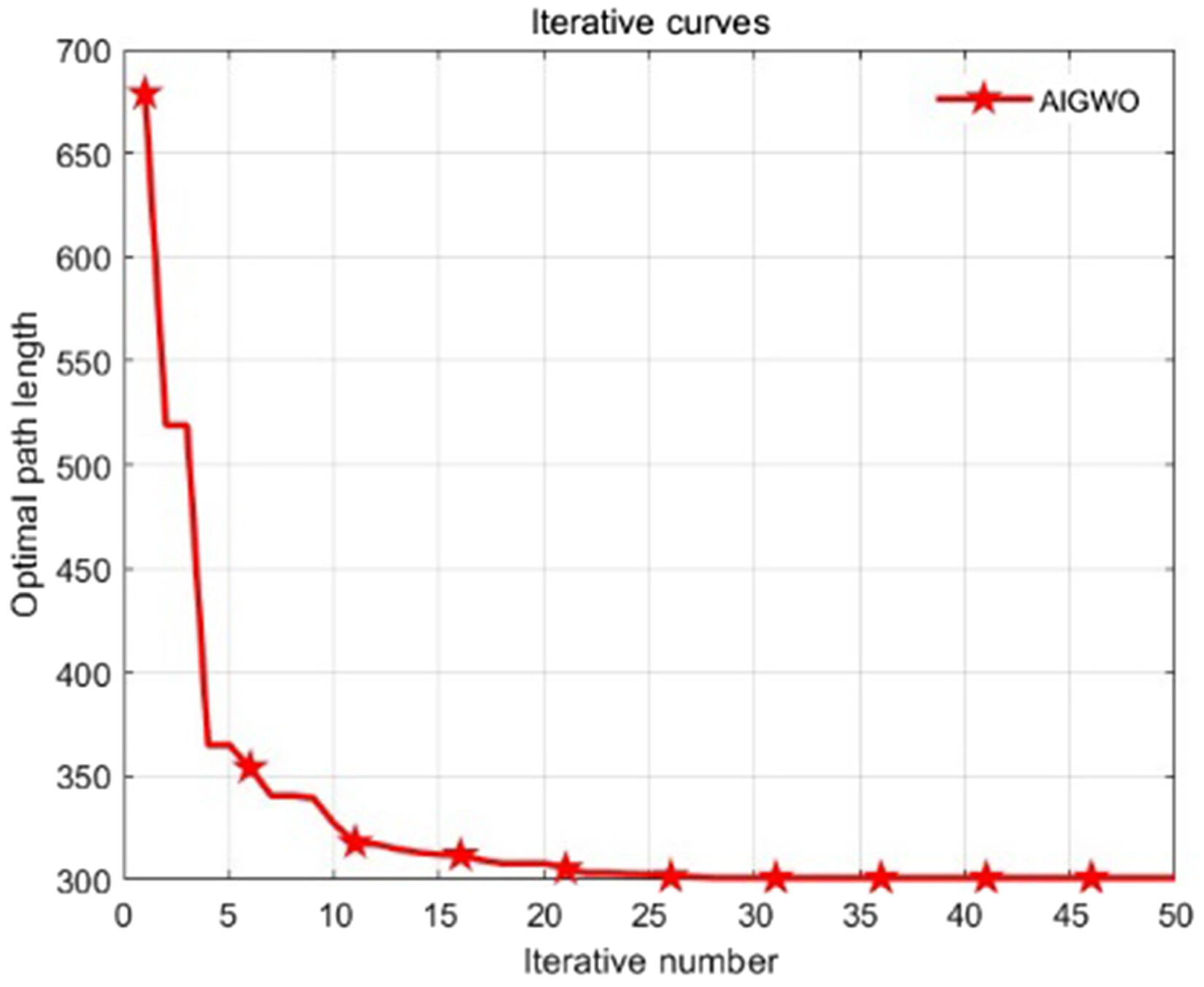
Update the swarm position using (equation (42)) and record the convergence curve.
Step 7: Termination check.
If the maximum number of iterations is reached, output the optimal path; otherwise, return to Step 2.
Core advantages over GWO variants
To highlight the novelty of AIGWO relative to incremental combinations of existing strategies, a targeted comparison was conducted with representative GWO variants (Aquila Exploration Grey Wolf Optimizer (AGWO),
33 Lévy-embedded Grey Wolf Optimizer (LGWO),
34 and Improved Grey Wolf Optimizer (IGWO)
35) commonly applied in UAV path planning. These variants typically rely on static or isolated enhancements: AGWO only adjusts the convergence factor adaptively, IGWO optimizes solely the random weight in position updates, and LGWO uses a fixed-radius local search.
In contrast, AIGWO's superiority arises from its scenario-specific, dynamic, and synergistic integration designed specifically for UAV transportation in complex mountainous environments. In particular, the adaptive decay factor is adjusted dynamically based on population diversity and is tightly integrated with three multi-scale search strategies as well as a dimension-learning-based candidate position update mechanism. This coordinated mechanism enables real-time tuning of the exploration–exploitation balance in response to convergence feedback, thereby effectively mitigating the limitations of prior variants, such as inadequate multi-objective adaptation and limited robustness against dynamic obstacles.
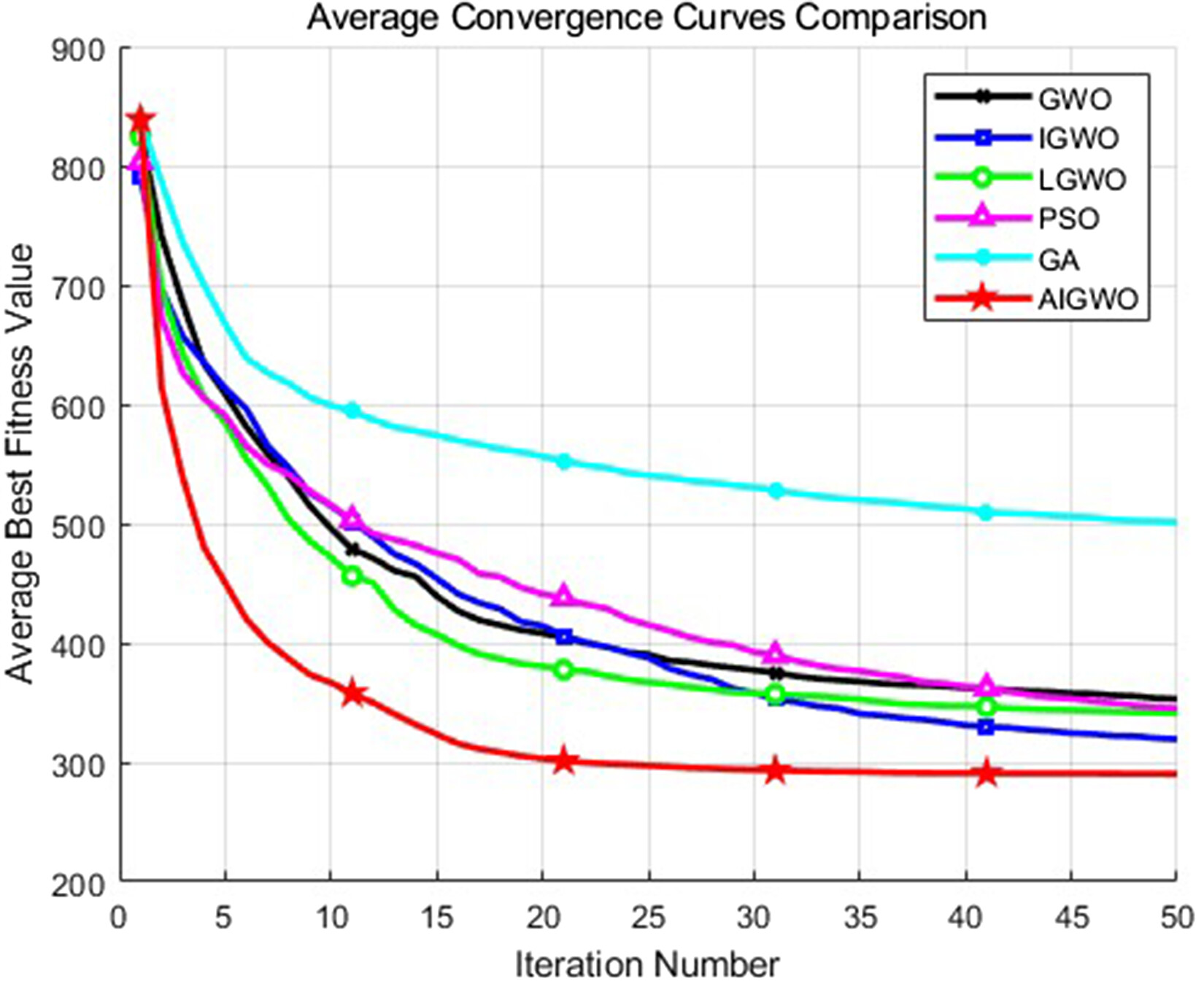
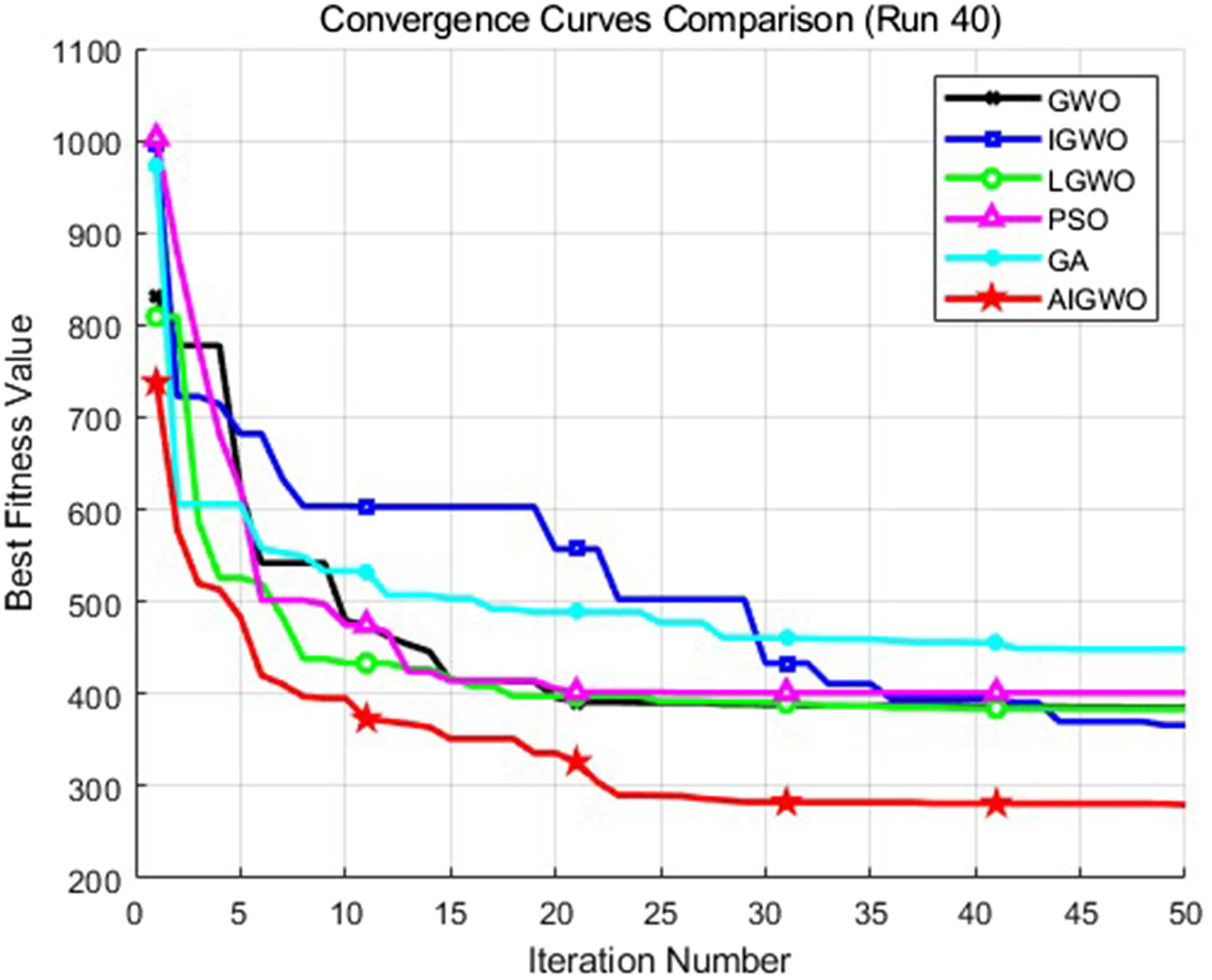
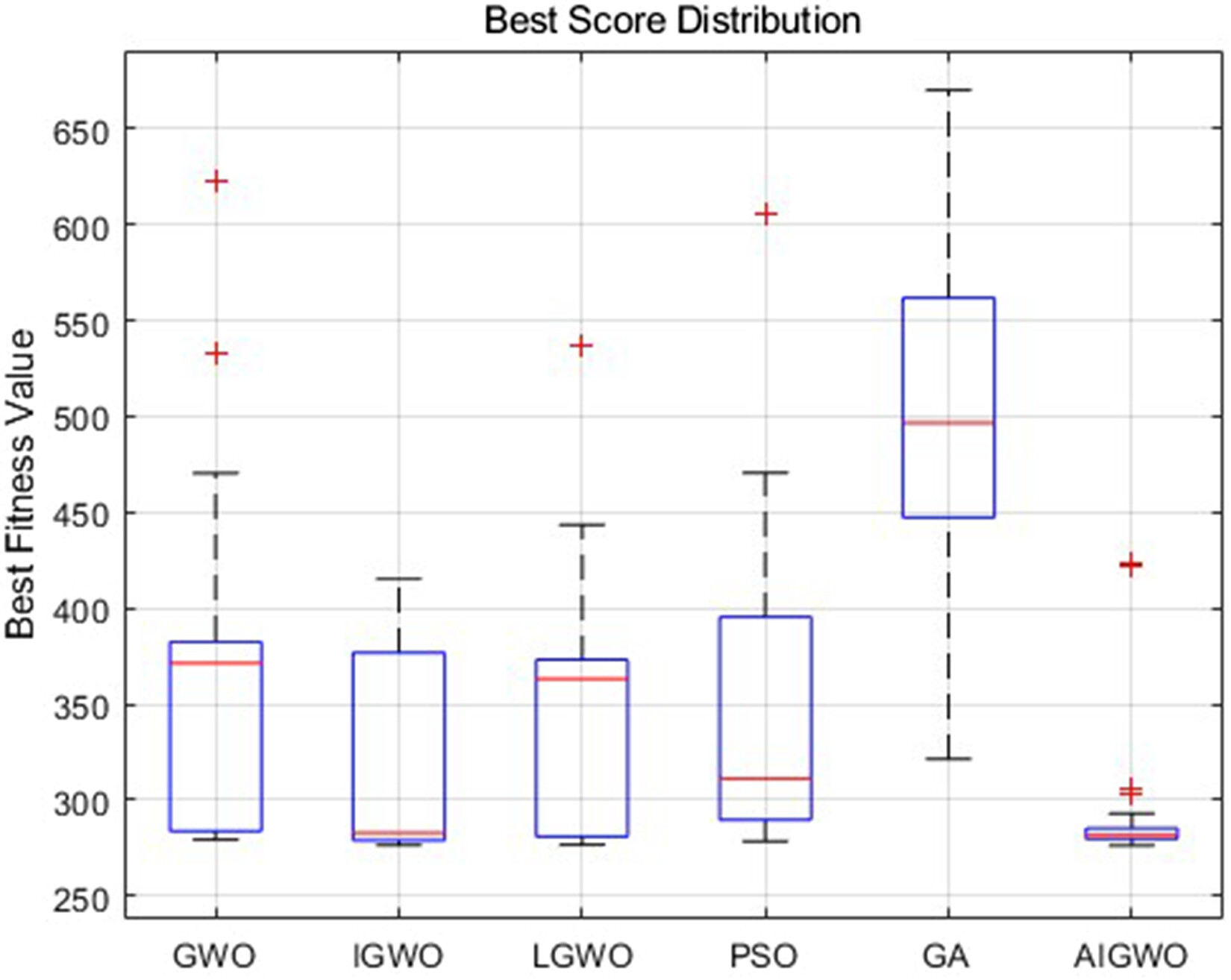
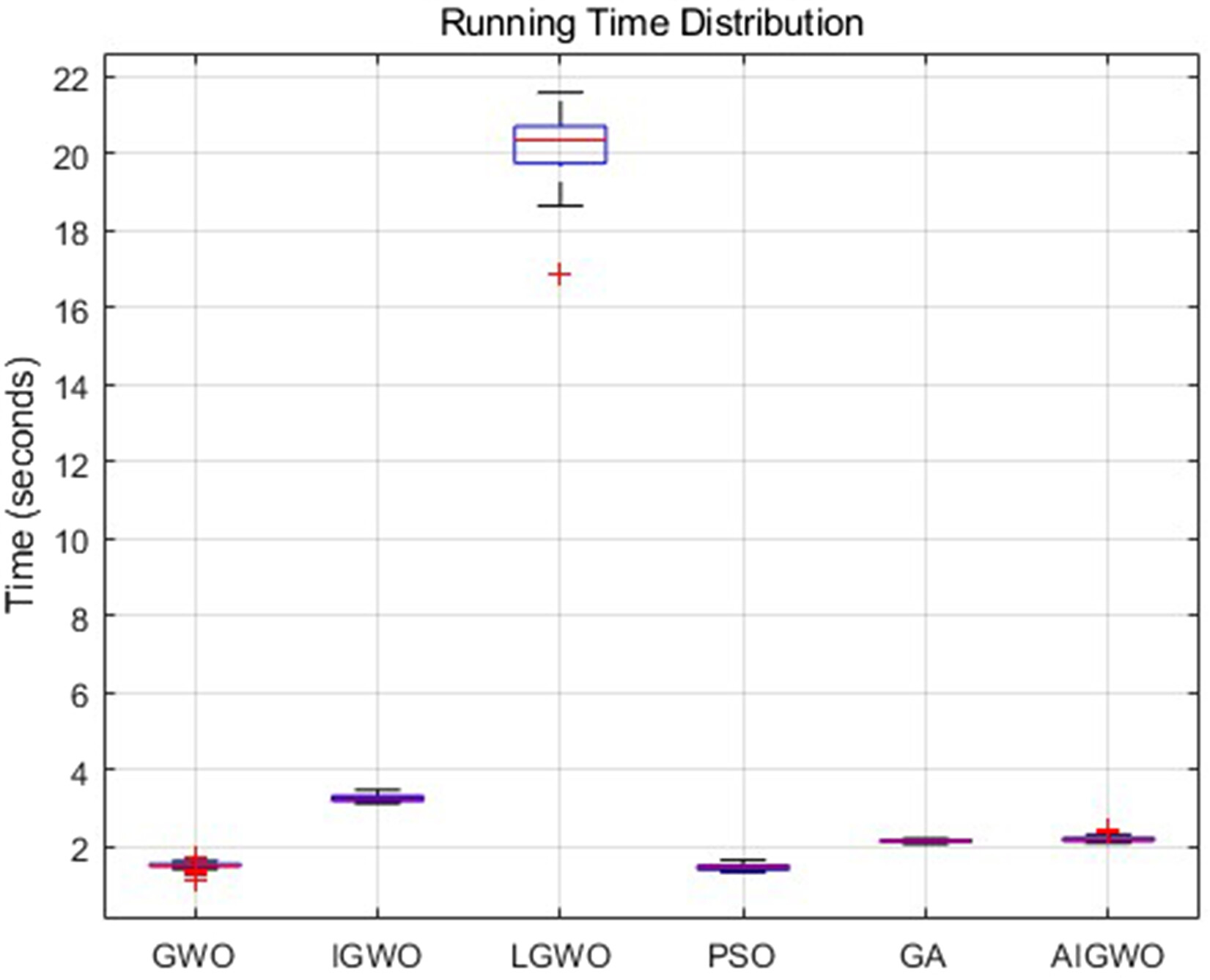
Moreover, the multi-objective evaluation function is tailor-made to prioritize practical mission constraints rather than generic optimization metrics. As demonstrated in section “Experimental design and result analysis,” this holistic design allows AIGWO to outperform GWO variants in high-dimensional, multi-constrained, and uncertain mountainous scenarios, delivering a better trade-off among convergence speed, solution quality, and environmental robustness. These results substantiate that AIGWO is not merely a simple hybrid but a mission-oriented innovation.
Time complexity and scalability analysis
To assess the practical applicability of AIGWO in UAV path planning, its time complexity and scalability with respect to population size , problem dimensionality , and obstacle count were comprehensively evaluated.
Time Complexity Analysis
The total time complexity of AIGWO is , where T denotes the maximum number of iterations, N represents the population size and D stands for the problem dimensionality. This polynomial complexity is consistent with the original GWO (). Despite the introduction of adaptive mechanisms and additional modules, the computational overhead remains manageable and does not lead to exponential growth.
Scalability Evaluation
Scalability was evaluated under standardized experimental conditions, using average runtime as the primary metric. Controlled experiments isolated the impact of each parameter by varying one while fixing the others at baseline values (
). For each configuration, the algorithm ran for 50 iterations over 3 independent runs, and average runtime was recorded.
1.
Population Size () Scalability
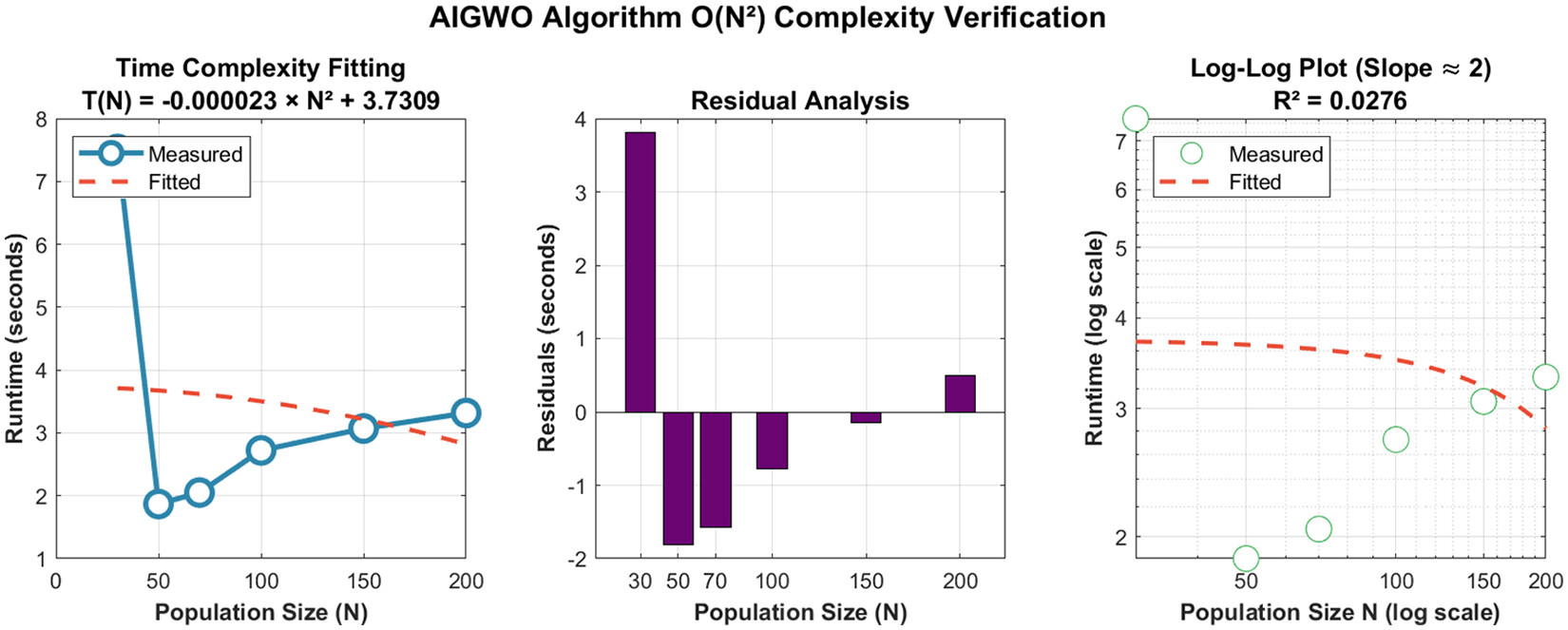
Population sizes were varied from 30 to 200. Runtime increased significantly from approximately 1.87 to 3.32 s. As shown in
Figure 2, this trend exhibits clear quadratic behavior, confirmed by curve fitting to the model (
). This confirms that population size dominates computational cost, consistent with the
term arising from inter-agent interactions in the core loop (
Figure 3).
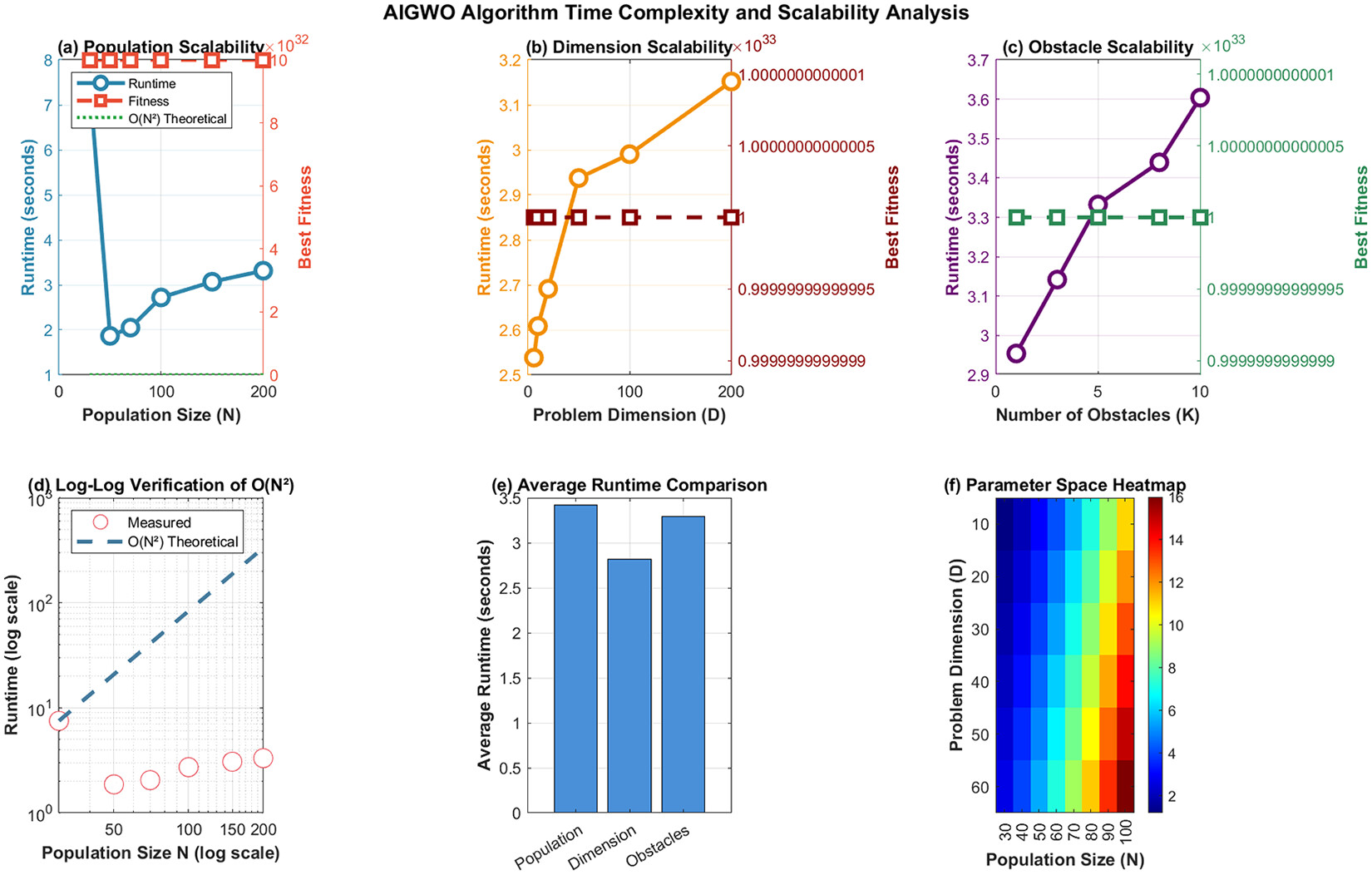
2. Scalability with Respect to D and
When D increased from 6 to 200, runtime rose moderately and approximately linearly from 2.54 to 3.15 s, verifying the contribution primarily from waypoint-based fitness evaluations and position updates.
When
K increased from 1 to 10, runtime increased modestly from 2.95 to 3.60 s, indicating
complexity due to obstacle collision checking.
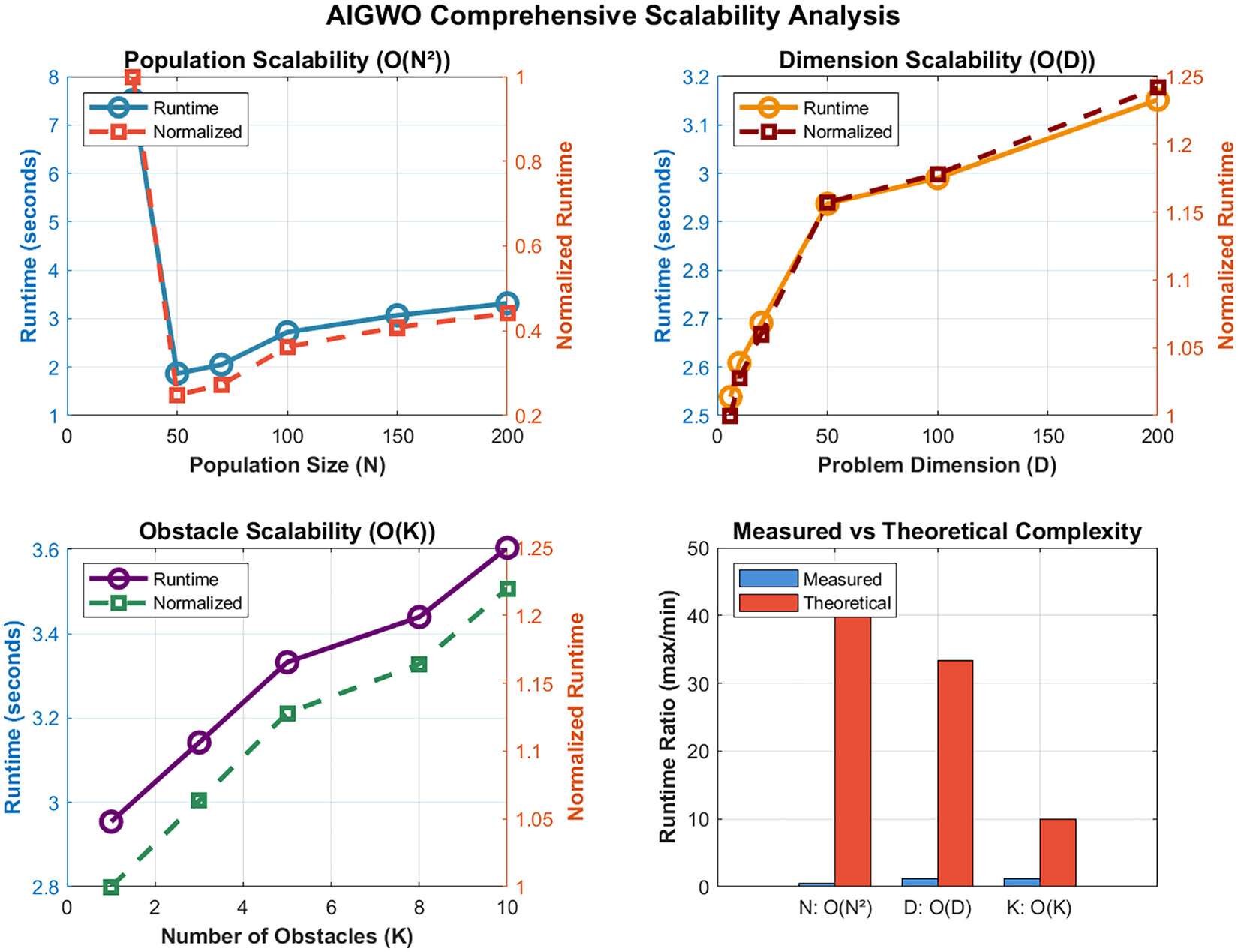
Normalized runtime analysis (
Figure 4) further confirmed the hierarchical impact of the parameters:
exerted the strongest influence, while
and
imposed manageable linear effects. The close alignment between empirical trends and theoretical complexity validates the analysis.
In summary, AIGWO demonstrates predictable and manageable scaling behavior: quadratic growth with N and linear growth with D and K. The dominant term underscores the importance of strategic population size selection to balance solution quality and computational efficiency, thereby confirming AIGWO's practical viability for real-world UAV path planning across varying problem scales.